詳細(xì)說明








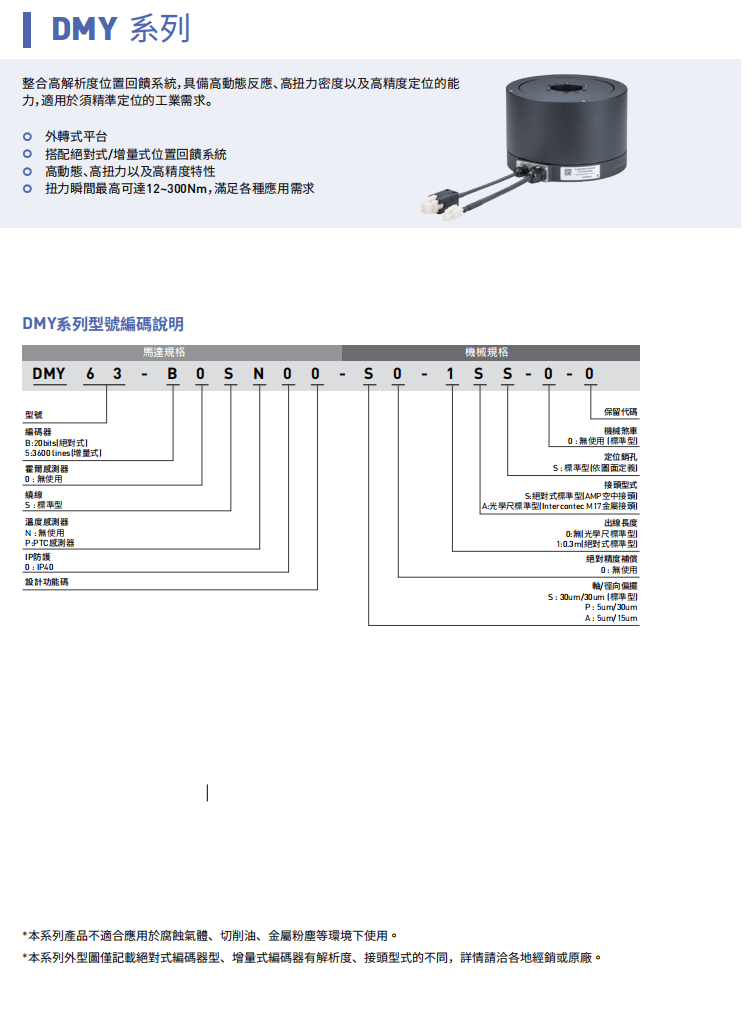
DMY 系列
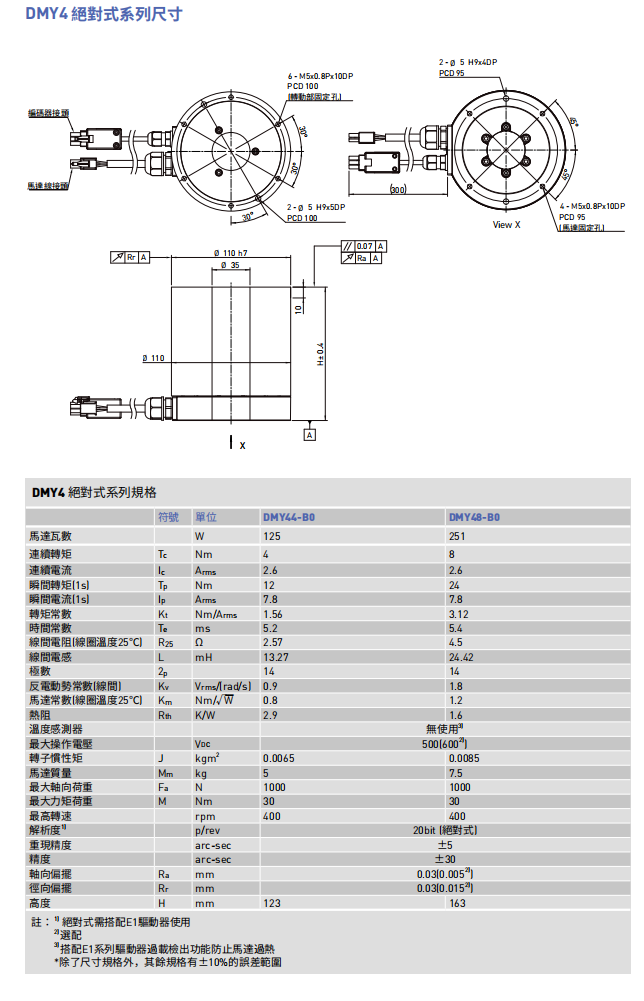
DMY4系列
DMY44- B0
DMY48-B0
DMY44-B0
DMY48-B0
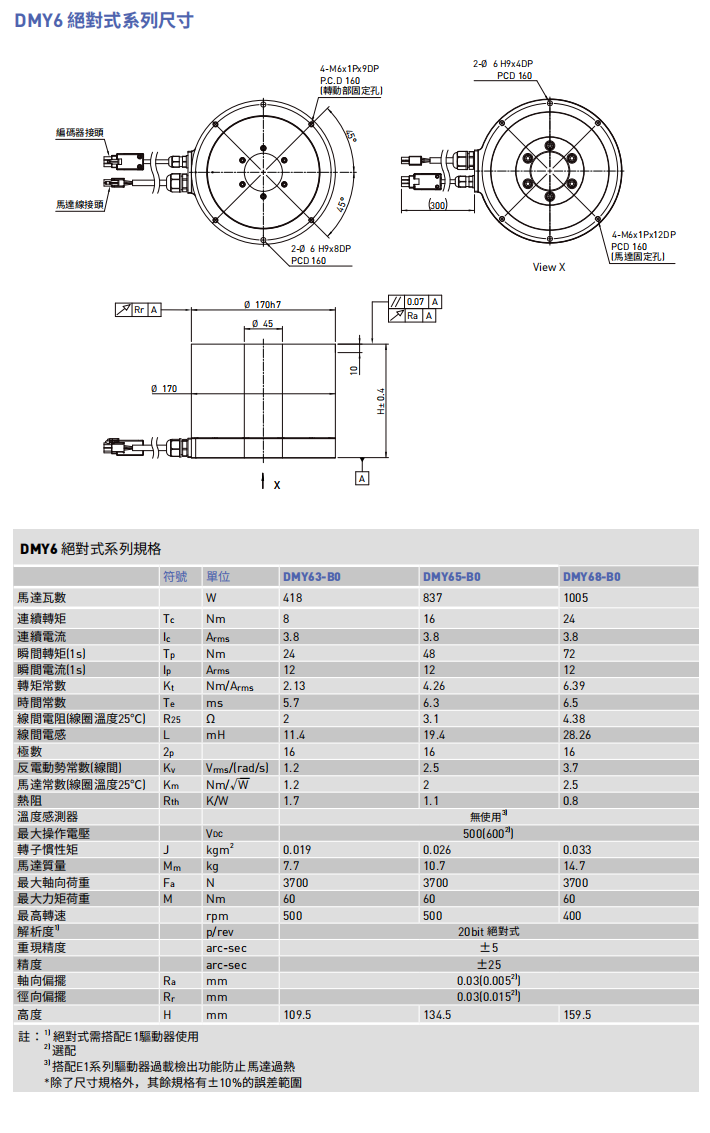
DMY6系列
DMY63-B0
DMY65-B0
DMY68-B0
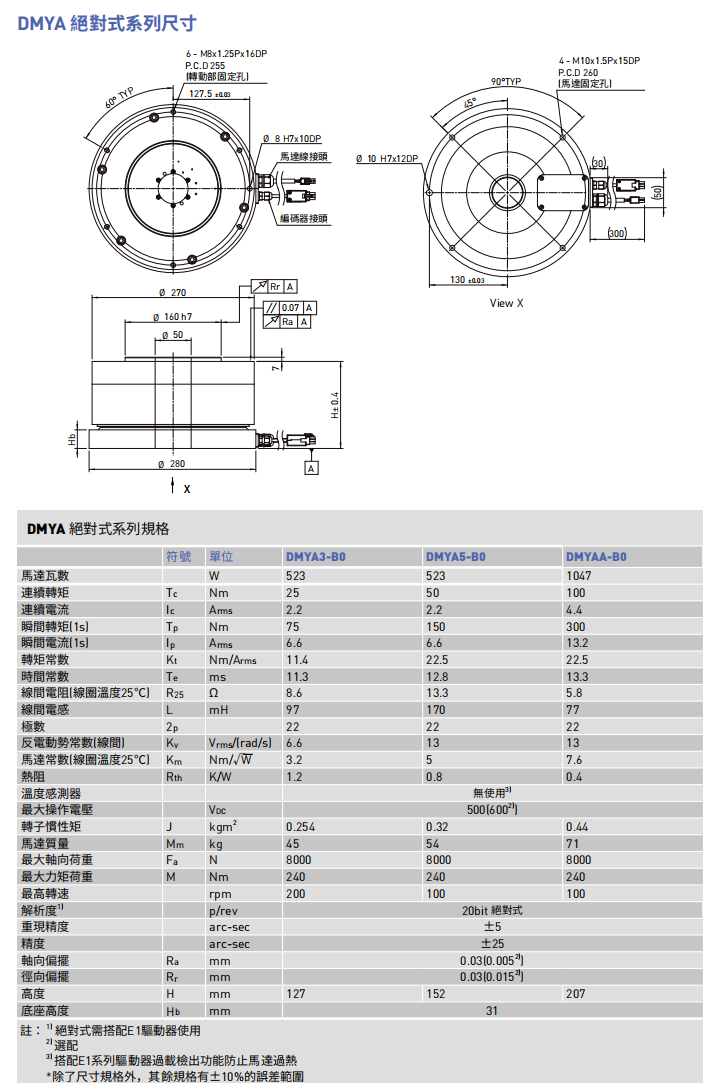
DMYA系列
DMYA3-B0
DMYA5-B0
DMYAA-B0
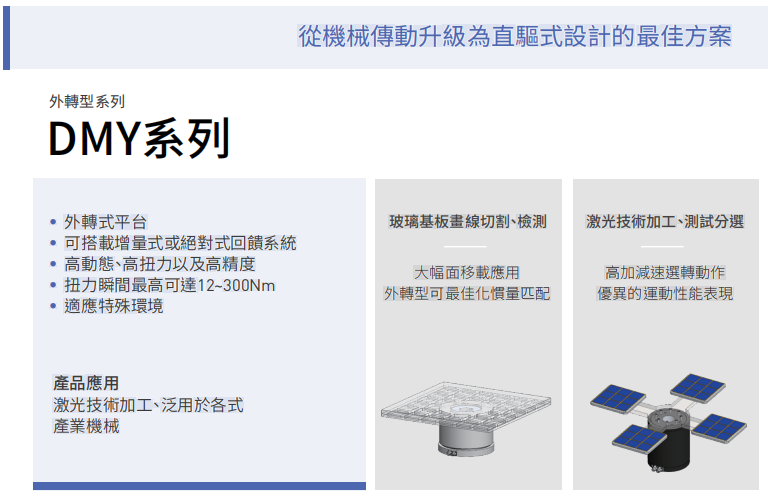
●外轉(zhuǎn)式平臺
●可搭載增量式或絕對式回饋系統(tǒng)
●高動態(tài)高扭力以及高精度
●扭力瞬間最高可達(dá)12-300Nm
●適應(yīng)特殊環(huán)境
產(chǎn)品應(yīng)用
激光技術(shù)加工、泛用于各式產(chǎn)業(yè)機械
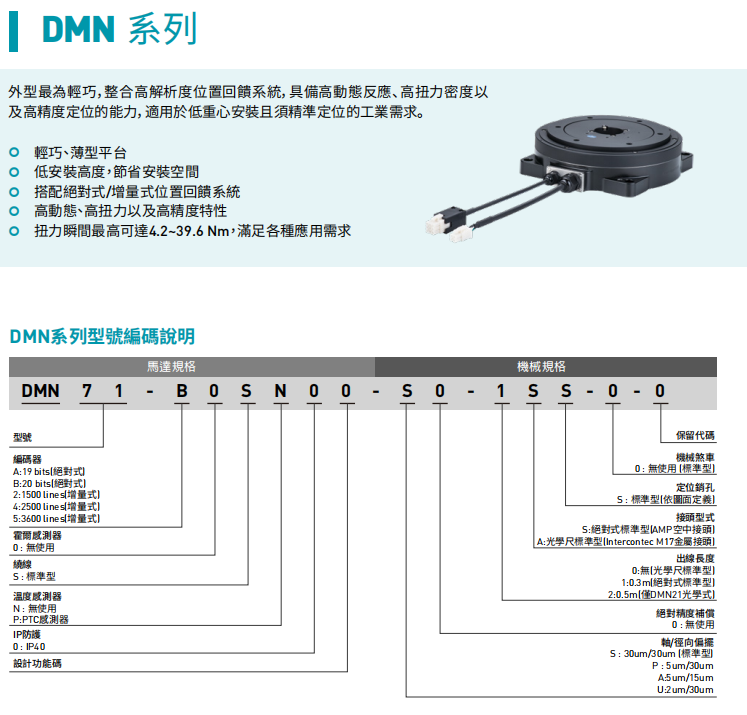
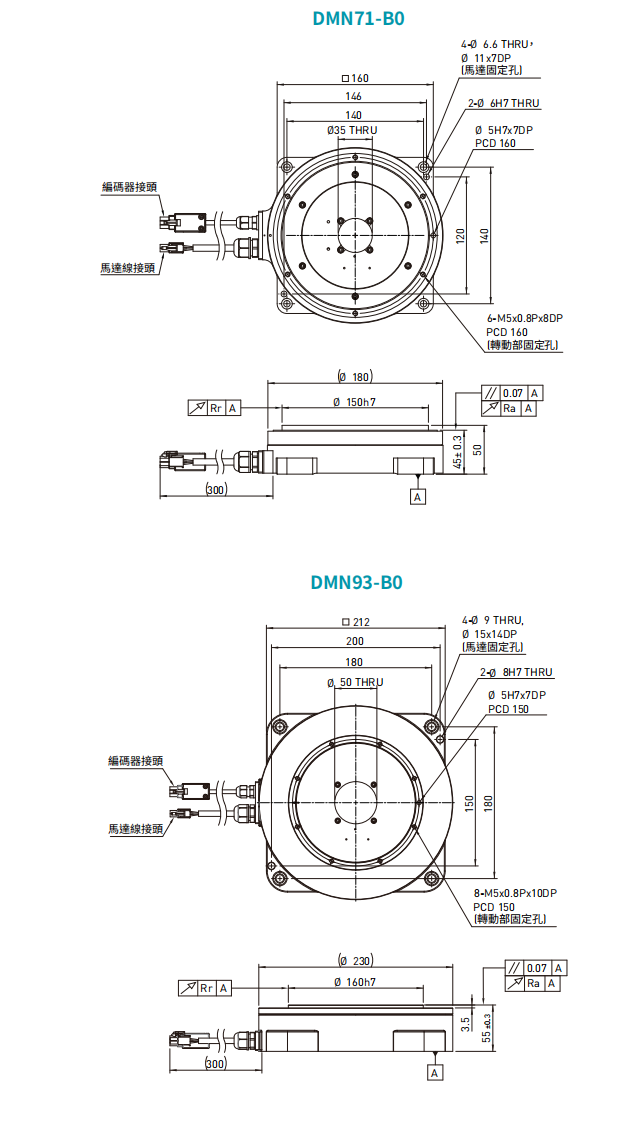
DMN 系列
DMS系列
DMS0系列
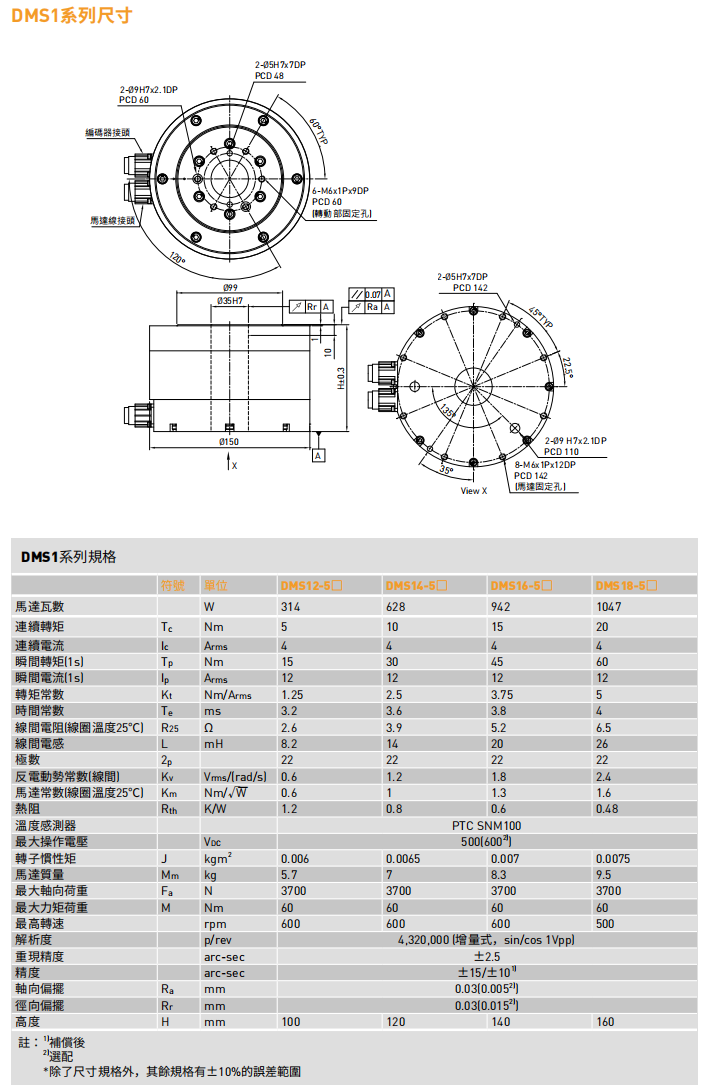
DMS1系列
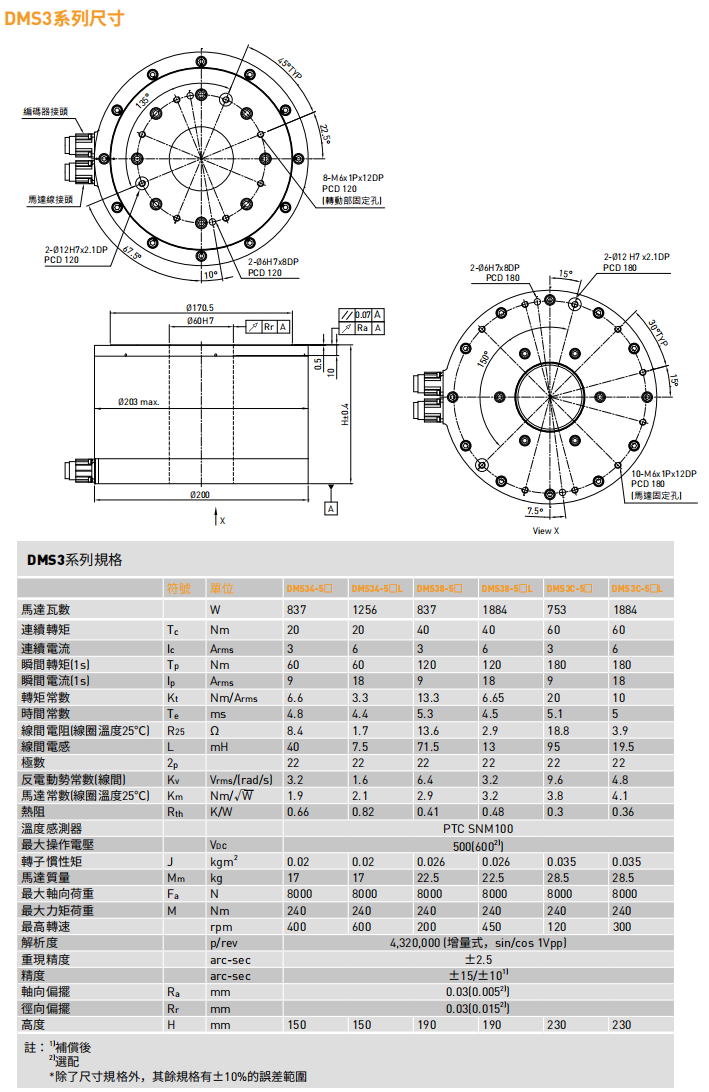
DMS3系列
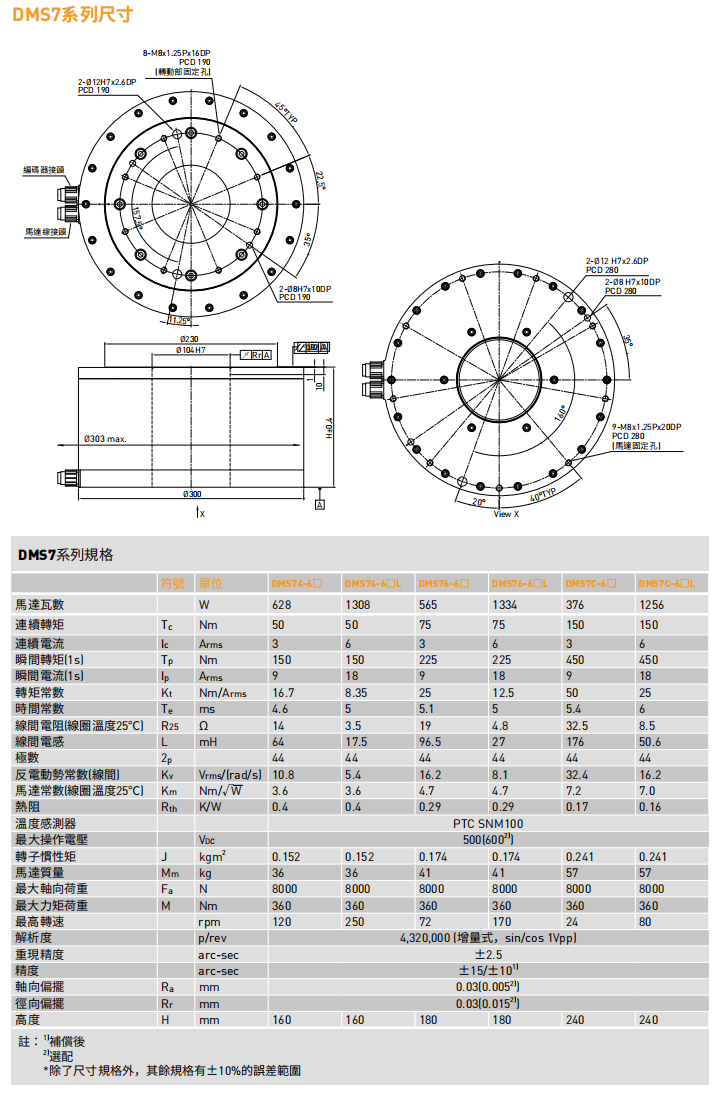
DMS7系列
●內(nèi)轉(zhuǎn)式平臺
●低安裝高度、節(jié)省安裝空間
●可依使用環(huán)境需求選用增量式/絕對式
●高動態(tài)、高扭力以及高精度
●扭力瞬間最高可達(dá)4.2~39.6Nm
產(chǎn)品應(yīng)用
3C電子涂飾、激光技術(shù)加工
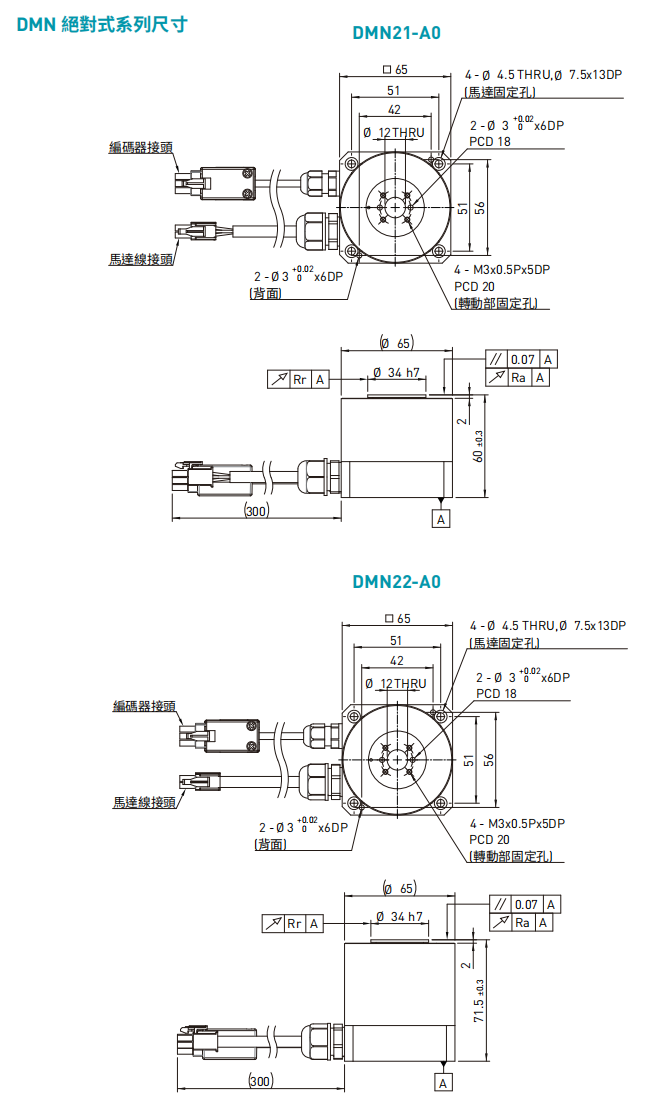
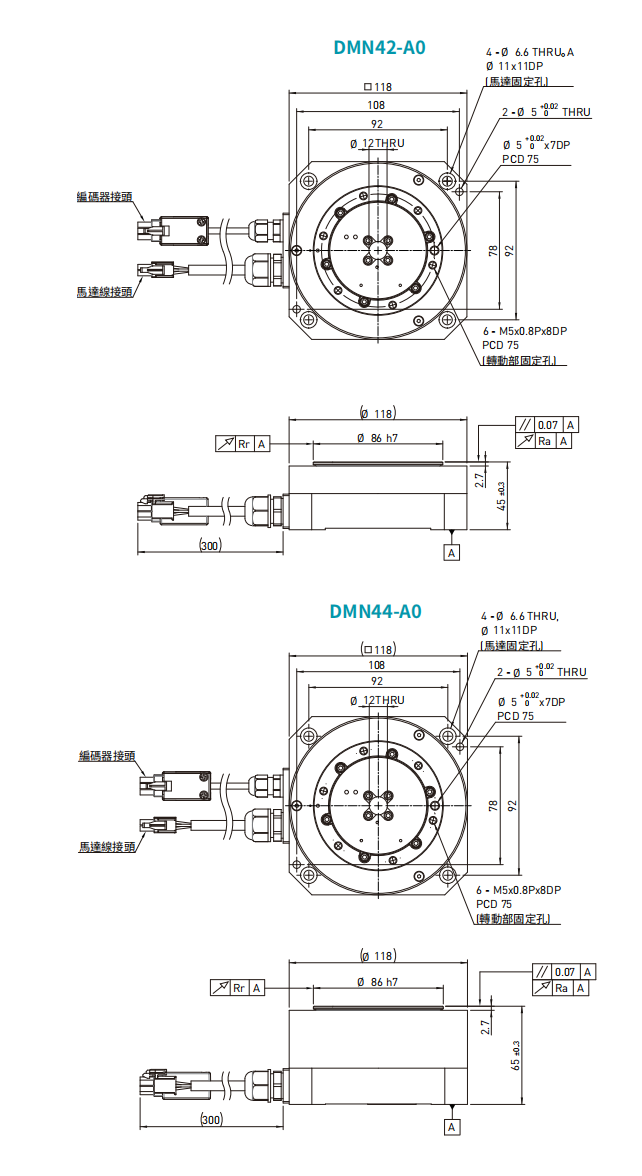
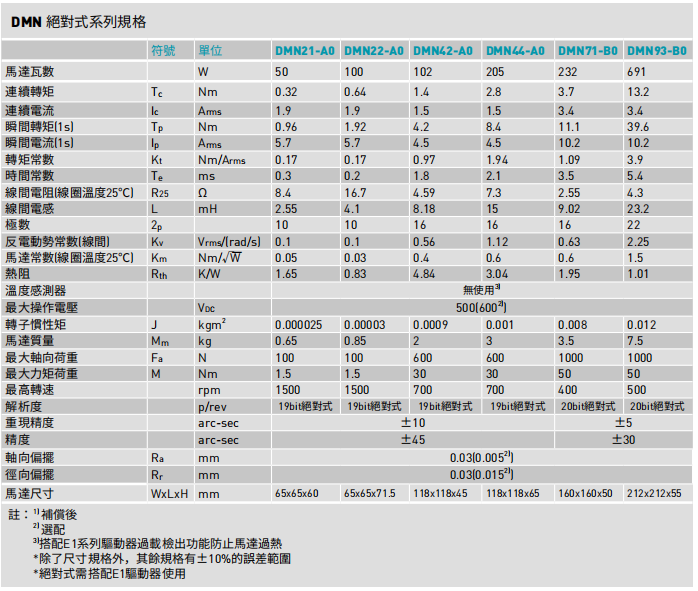
DMN絕對式系列規(guī)格
DMN絕對式系列規(guī)格
DMN21-A0
DMN22-A0
DMN42-A0
DMN44-A0
DMN71-B0
DMN93-B0
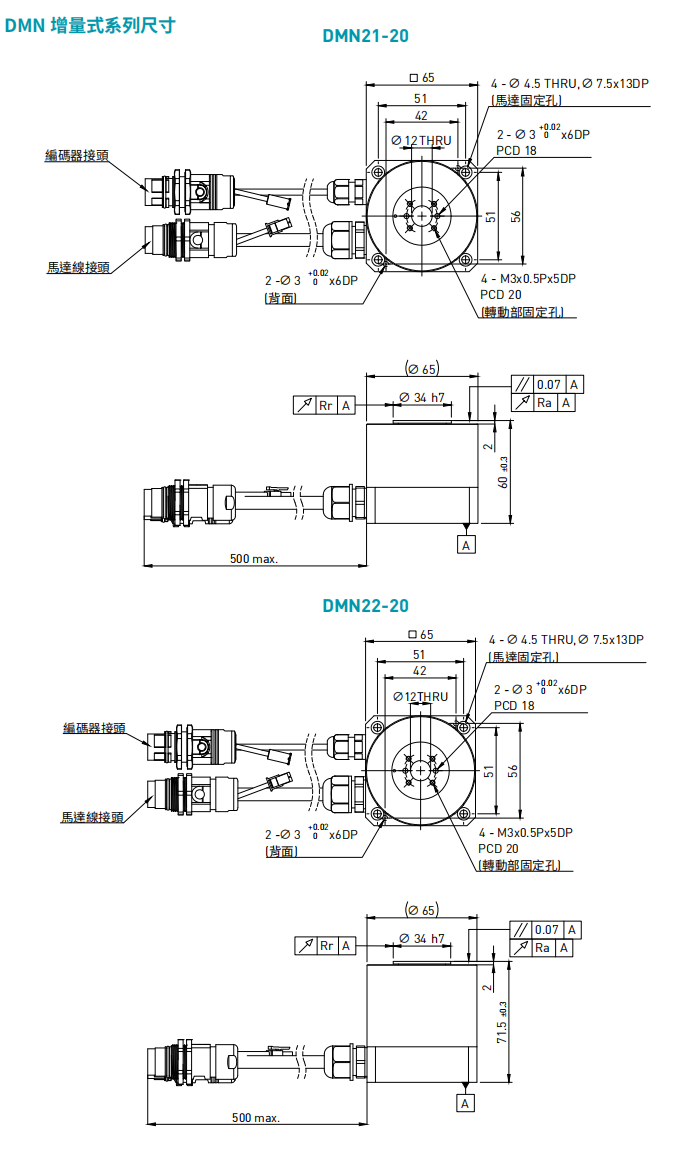
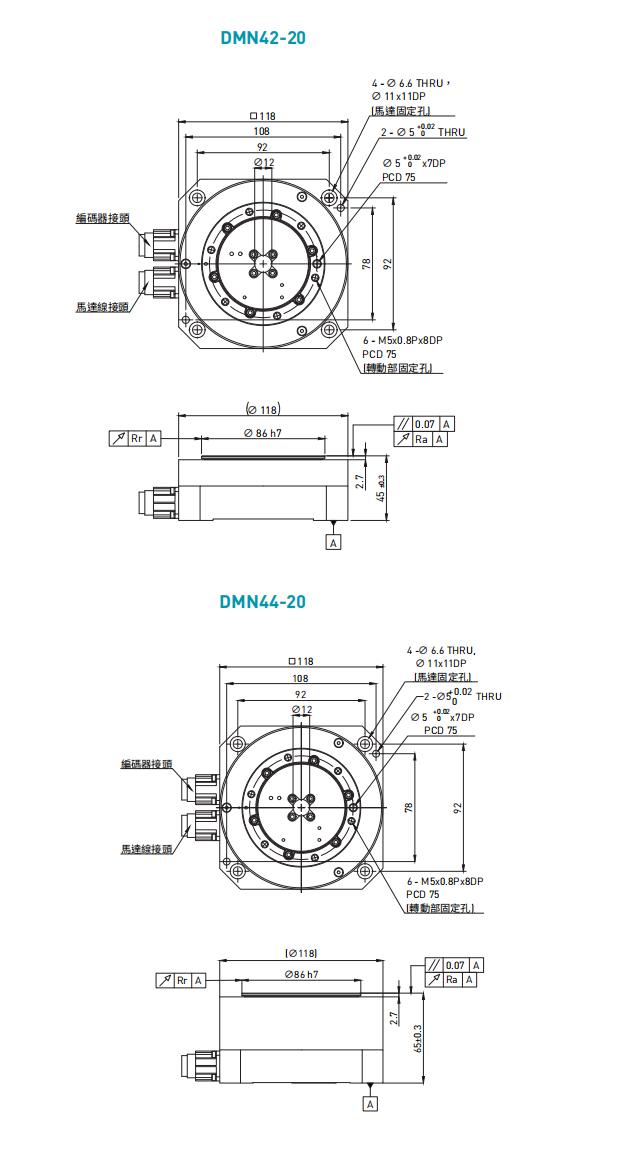
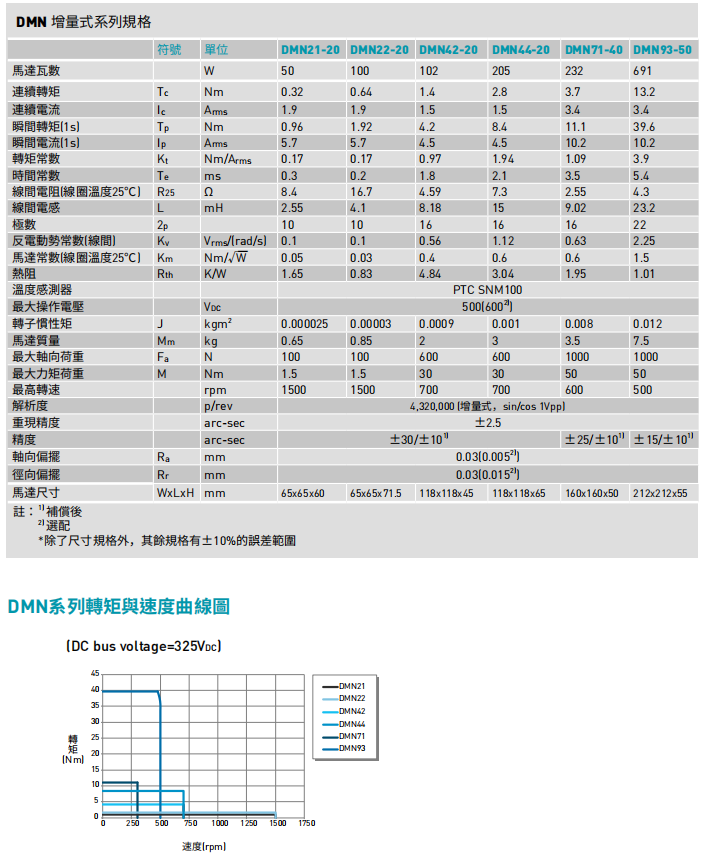
DMN增量式系列規(guī)格
DMN21-20
DMN22-20
DMN42-20
DMN44-20
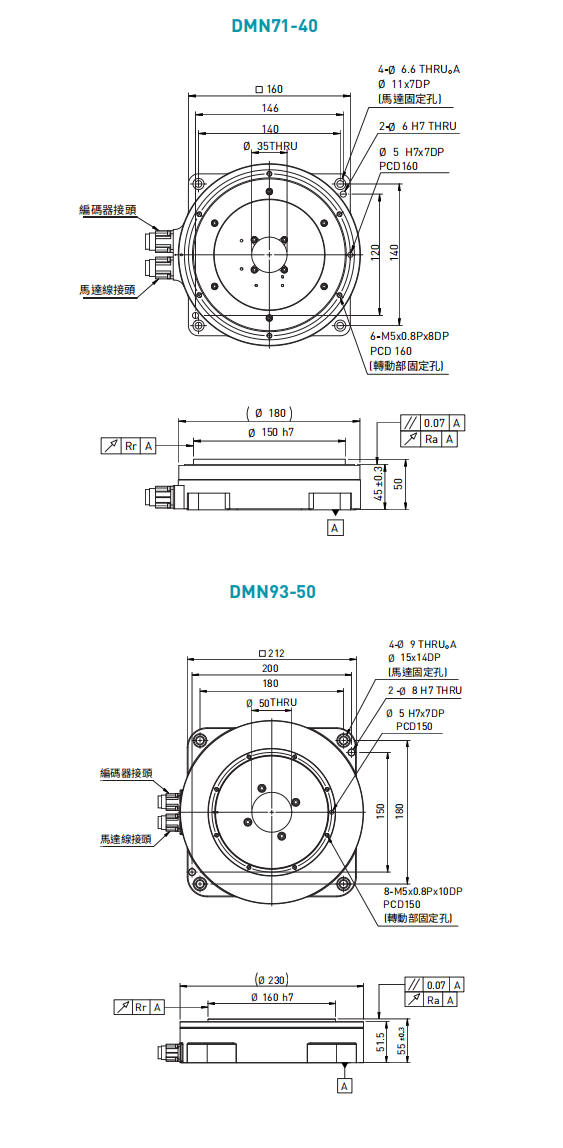
DMN71-40
DMN93-50
DMS系列
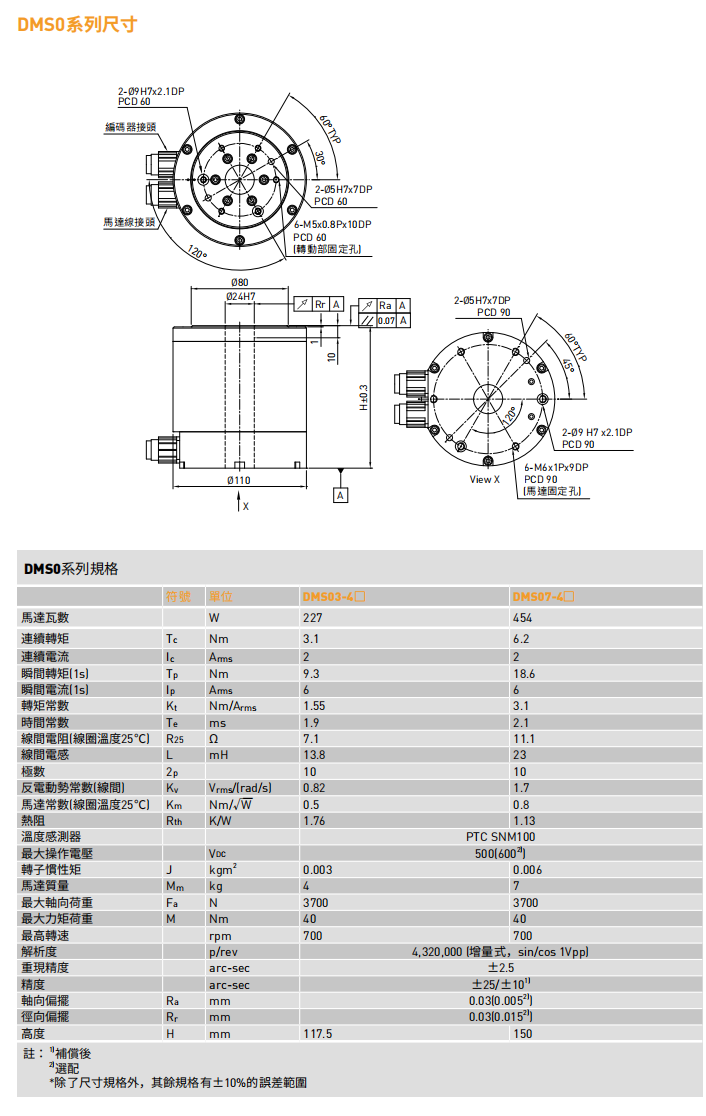
DMS0系列
DMS03-4
DMS07-4
DMS1系列
DMS12-5
DMS14-5
DMS16-5
DMS18-5
DMS3系列
DH534-5
DM534-5L
DM538-5
DM538-5L
DMS3C-5
DMS3C-5L
DMS7系列
DM574-6
DM574-6L
DM576-6
DM576-6L
DMS7C-6
DMS7C-6L
內(nèi)轉(zhuǎn)式平臺
高解析位置回饋系統(tǒng)
●瞬間轉(zhuǎn)矩9.3~450Nm
可選IP65防護(hù)等級
●可選安全、定位煞車
●可選用霍爾感測器
產(chǎn)品應(yīng)用
激光技術(shù)加工泛用于各式
產(chǎn)業(yè)機械
●內(nèi)轉(zhuǎn)式平臺
●高解析位置回饋系統(tǒng)
●瞬間轉(zhuǎn)矩9.3~450Nm可選IP65防護(hù)等級
●可選安全、定位煞車
●可選用霍爾感測器
產(chǎn)品應(yīng)用
激光技術(shù)加工泛用于各式產(chǎn)業(yè)機械
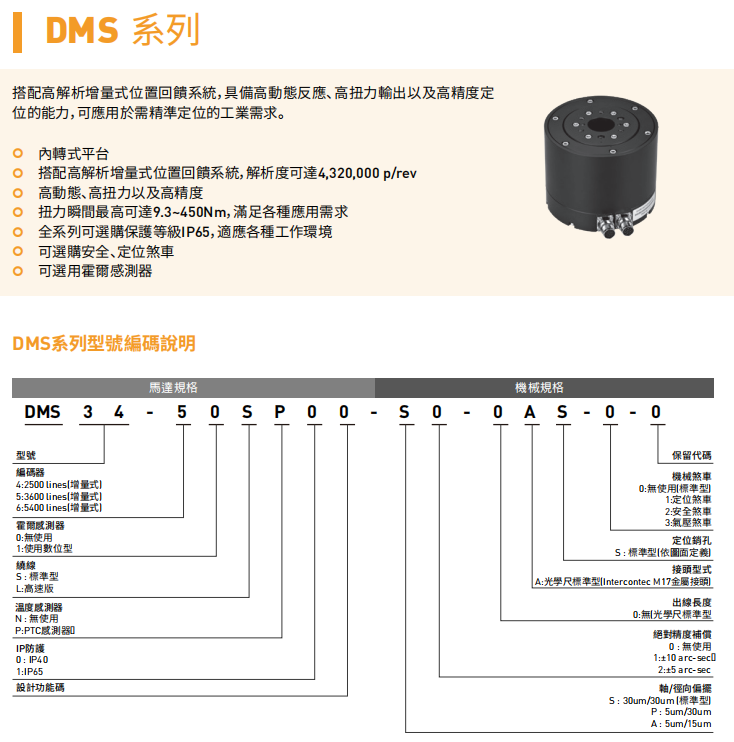
搭配高解析增量式位置回饋系統(tǒng),具備高動態(tài)反應(yīng)、高扭力輸出以及高精度定位的能力,可應(yīng)用于需精準(zhǔn)定位的工業(yè)需求。
DMT系列
市面上最薄的直驅(qū)馬達(dá),可以大幅降低機臺高度,搭配大中空軸可輕易布置各式電纜氣管。配合高解析度編碼器及絕佳的動態(tài)特性,可以輕鬆?wèi)?yīng)用于各式產(chǎn)品檢測及裂程。
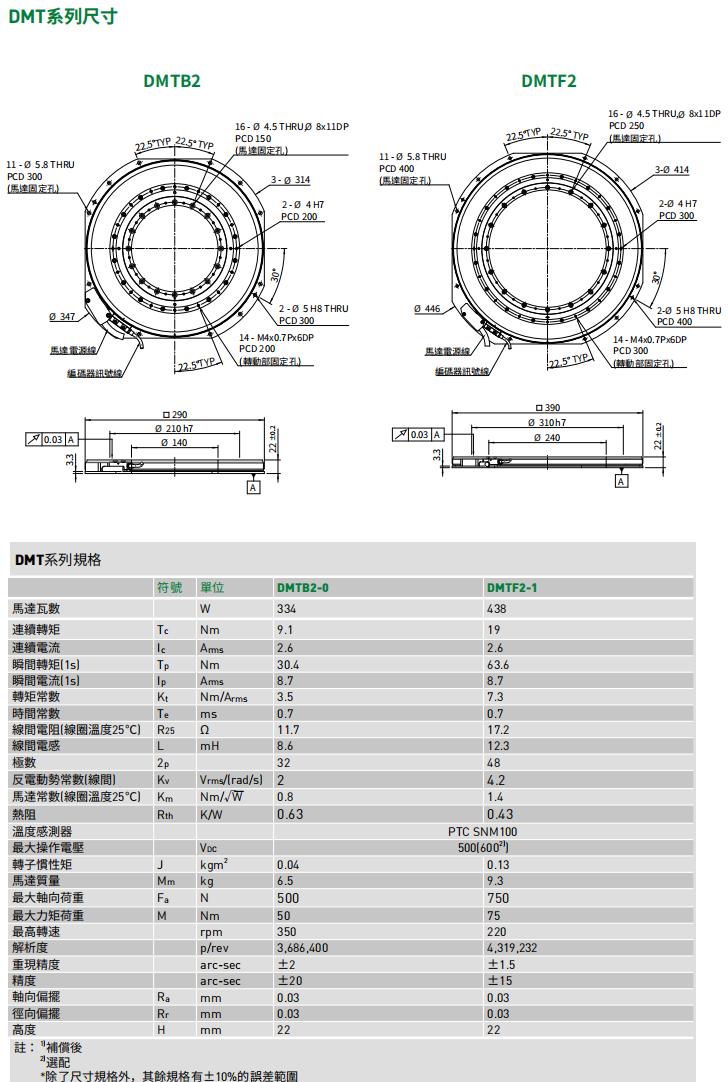
DMTB系列-DMTB2-0
DMTF系列-DMTF2-1
●超薄型
●高解析度
●無背隙直驅(qū)式馬達(dá)
●高剛性軸承設(shè)計
●無鐵心設(shè)計、無頓力與低速度連波特性
產(chǎn)品應(yīng)用
AOI檢測\半導(dǎo)體裂程
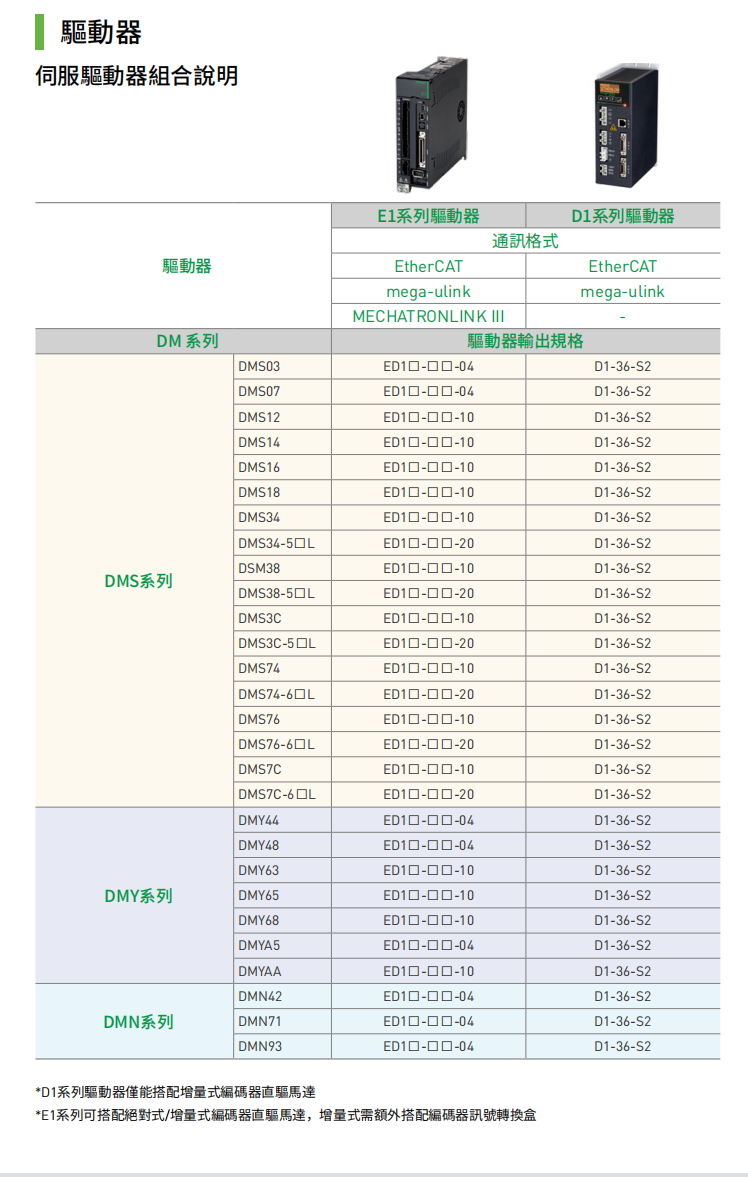
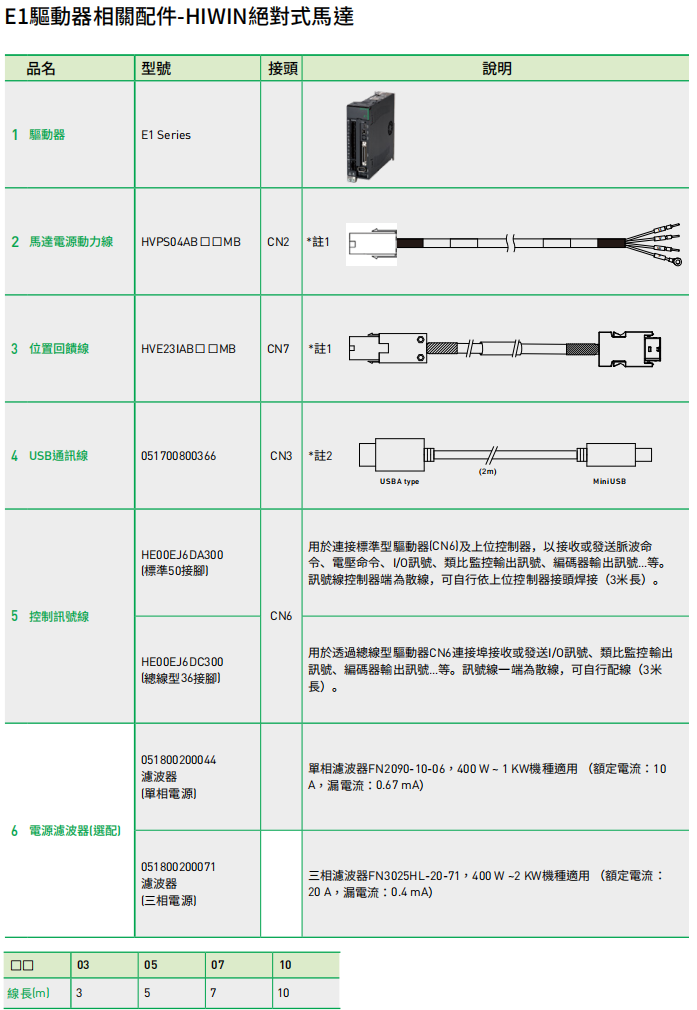
驅(qū)動器
伺服驅(qū)動器組合說明
DMY4系列
DMY6系列
DMYA系列
DMN系列
DMS系列
DMS0系列
DMS1系列
DMS3系列
DMS7系列
DMT系列
DMTB系列
DMTF系列
市面上最薄的直驅(qū)馬達(dá),可以大幅降低機臺高度,搭配大中空軸可輕易布置各
式電纜氣管。配合高解析度編碼器及絕佳的動態(tài)特性,可以輕鬆?wèi)?yīng)用于各式產(chǎn)
品檢測及裂程。
。超薄型
。高解析度
。無背隙直驅(qū)式馬達(dá)
。高剛性軸承 設(shè)計
。無鐵心設(shè)計、無頓力與低速度連波特性
驅(qū)動器
伺服驅(qū)動器組合說明
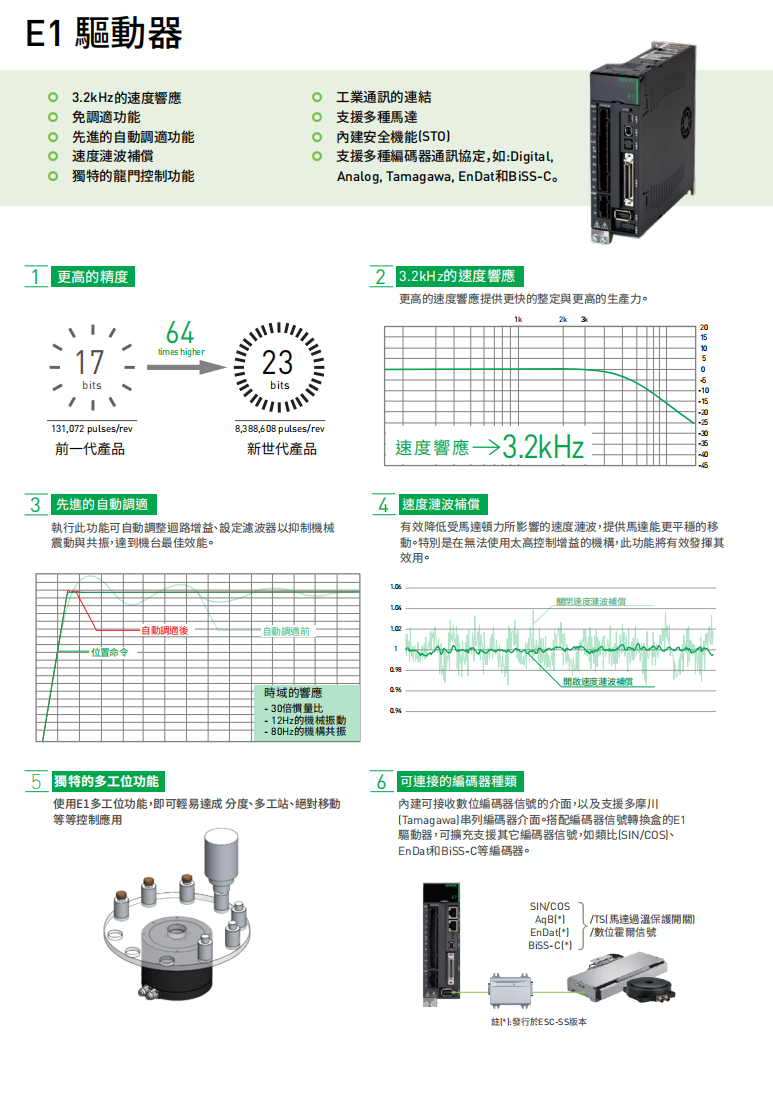
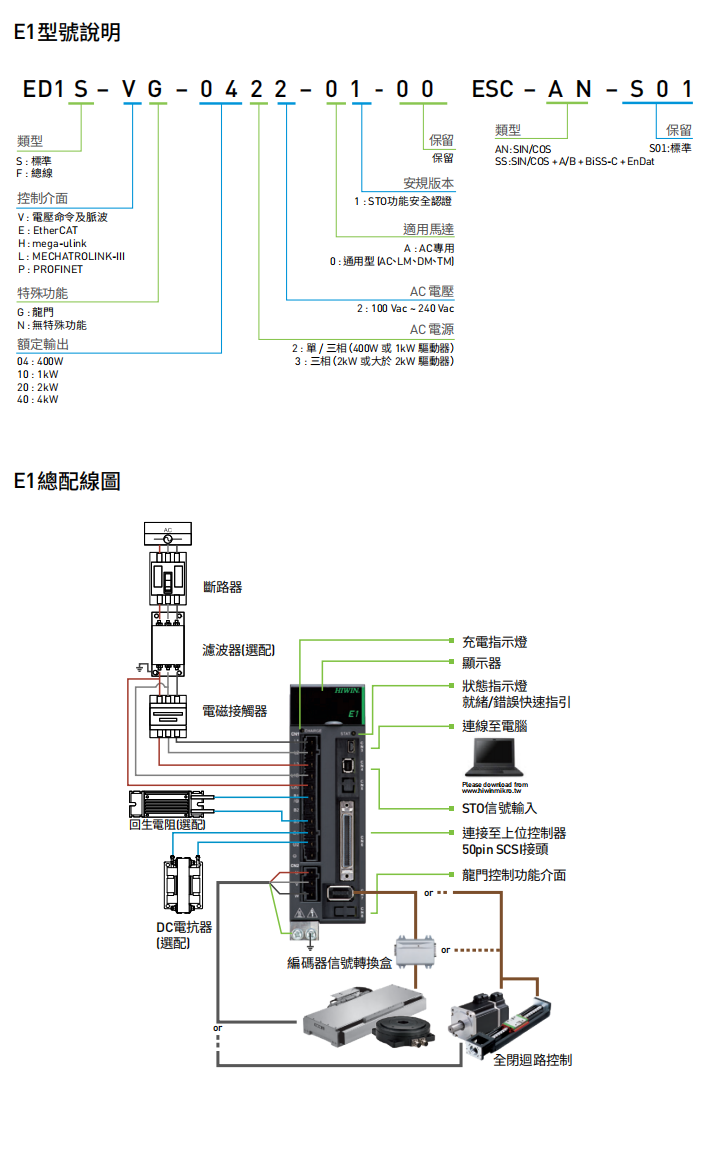
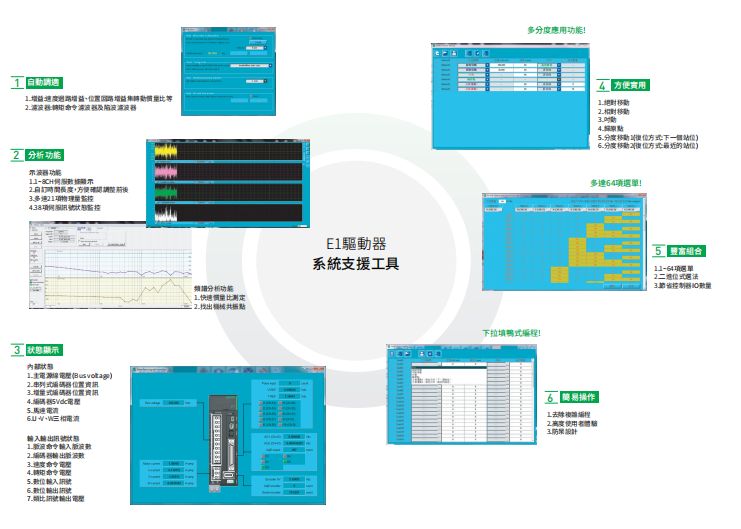
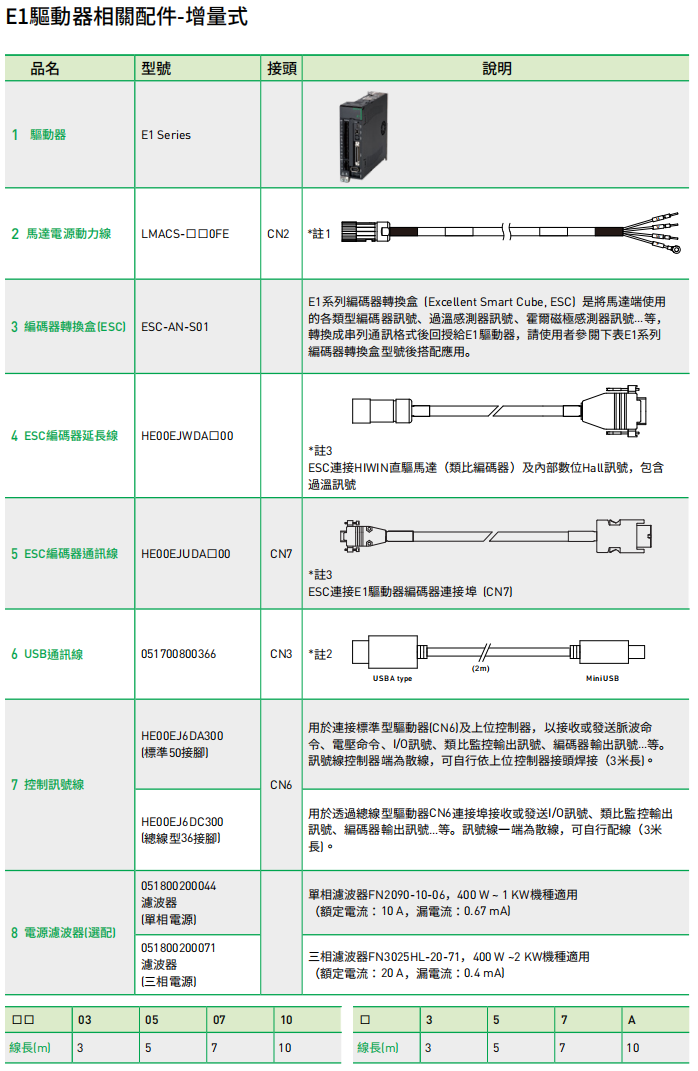
E1 驅(qū)動器
3.2kHz的速度響應(yīng)
免調(diào)適功能
先進(jìn)的自動調(diào)適功能
速度漣波補償
獨特的龍門控制功能
工業(yè)通訊的連結(jié)
支援多種馬達(dá)
內(nèi)建安全機能[STO)
支援多 種編碼器通訊協(xié)定,如:Digital,
Analog, Tamagawa, EnDat和BiSS-C。
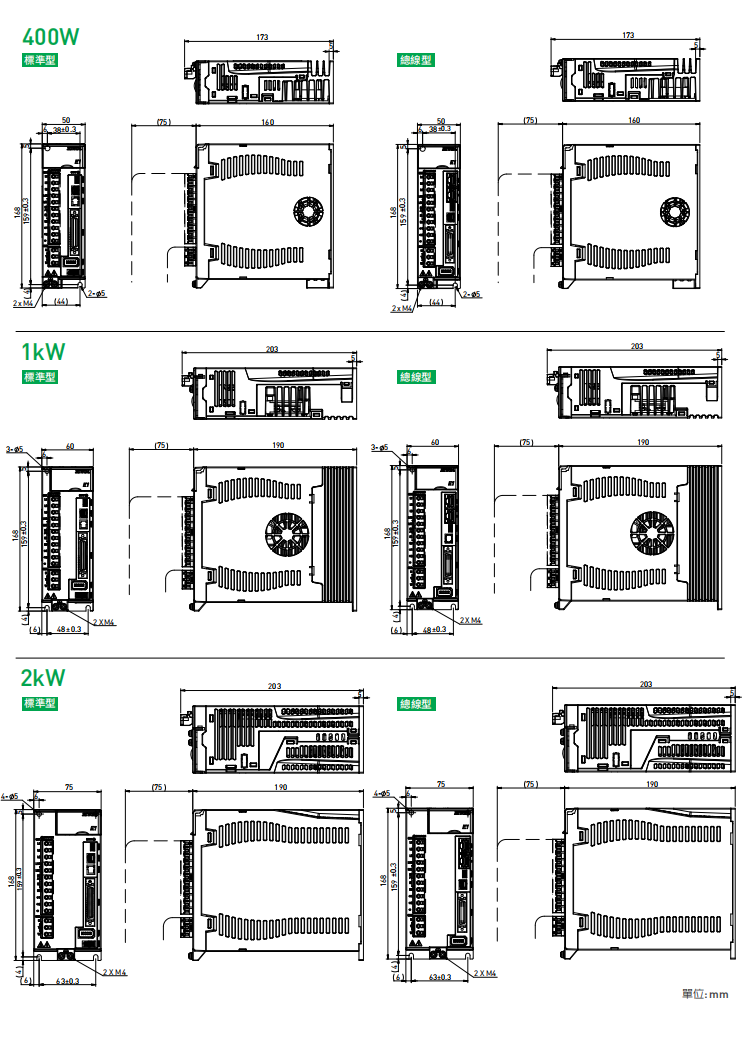
400W
1kW
2kW
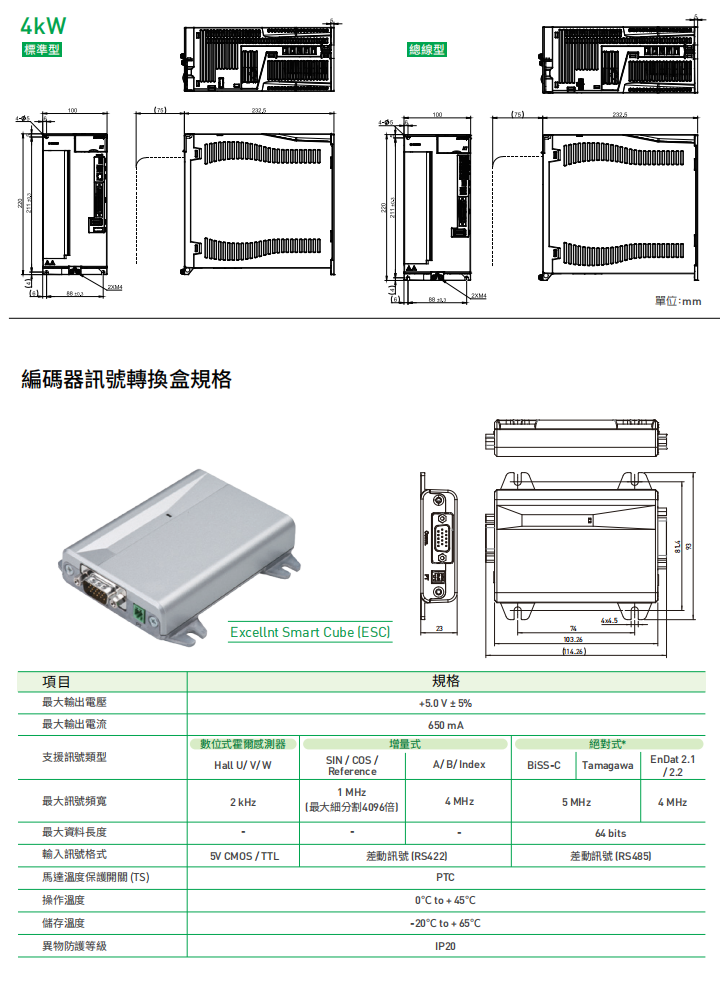
4kW
400W
1kW
2kW
4kW
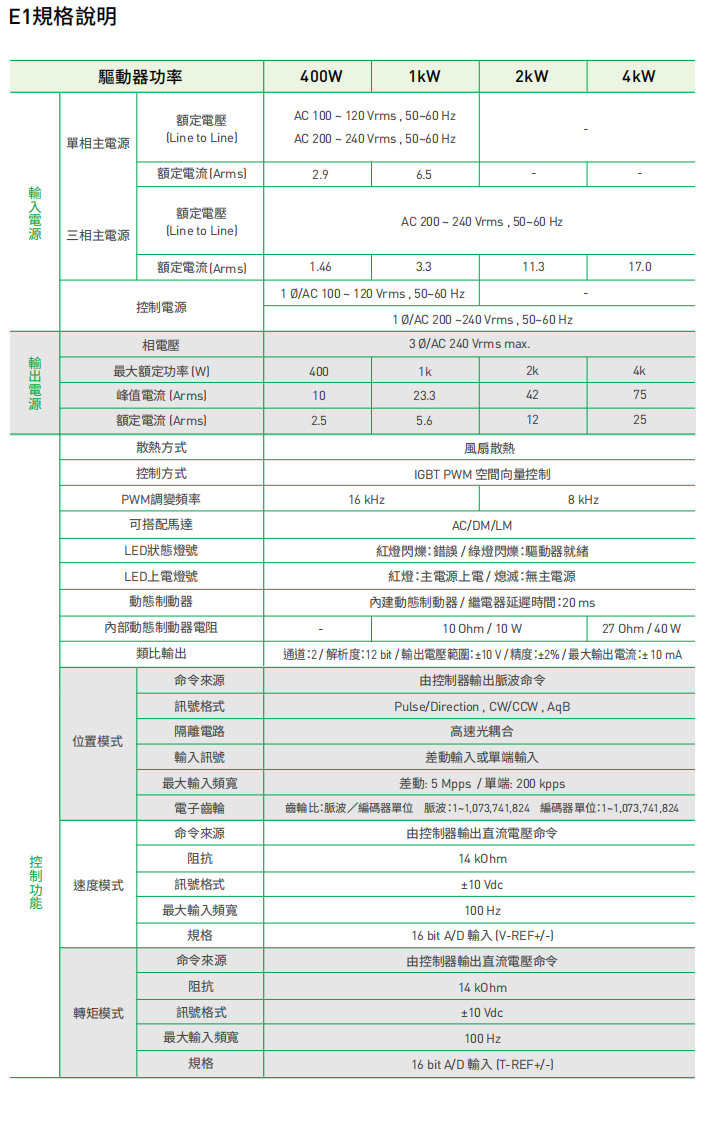
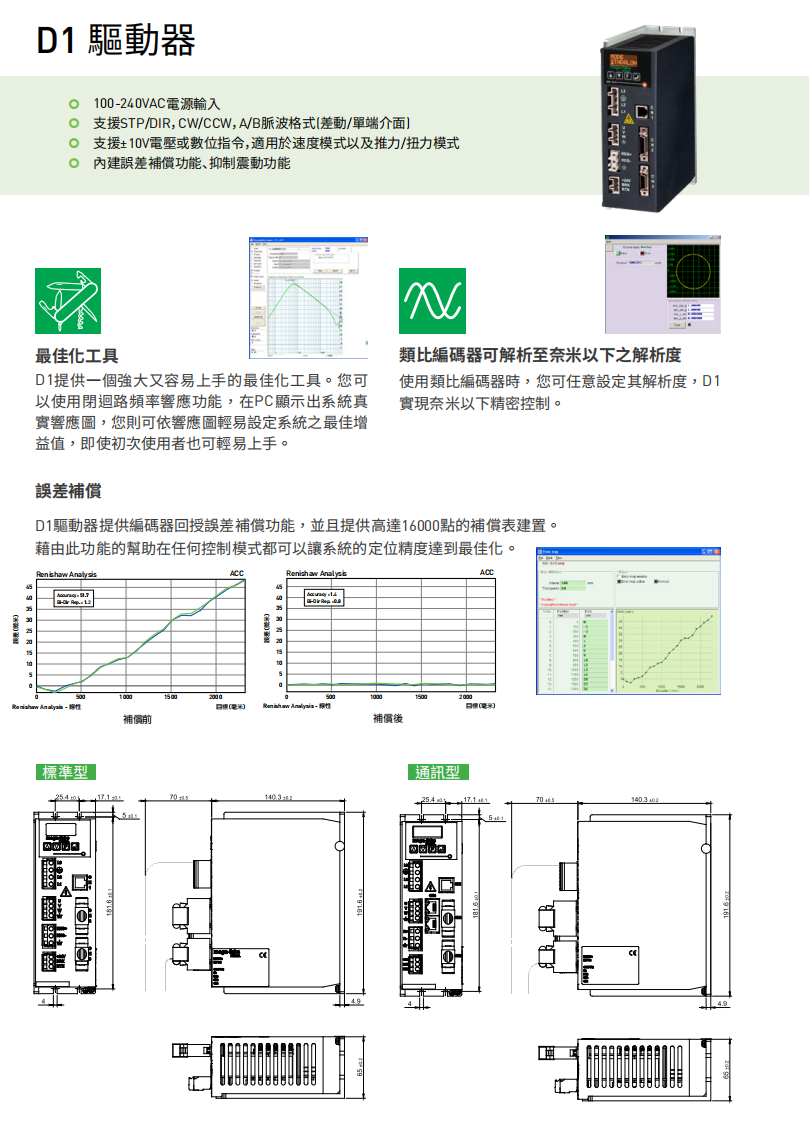
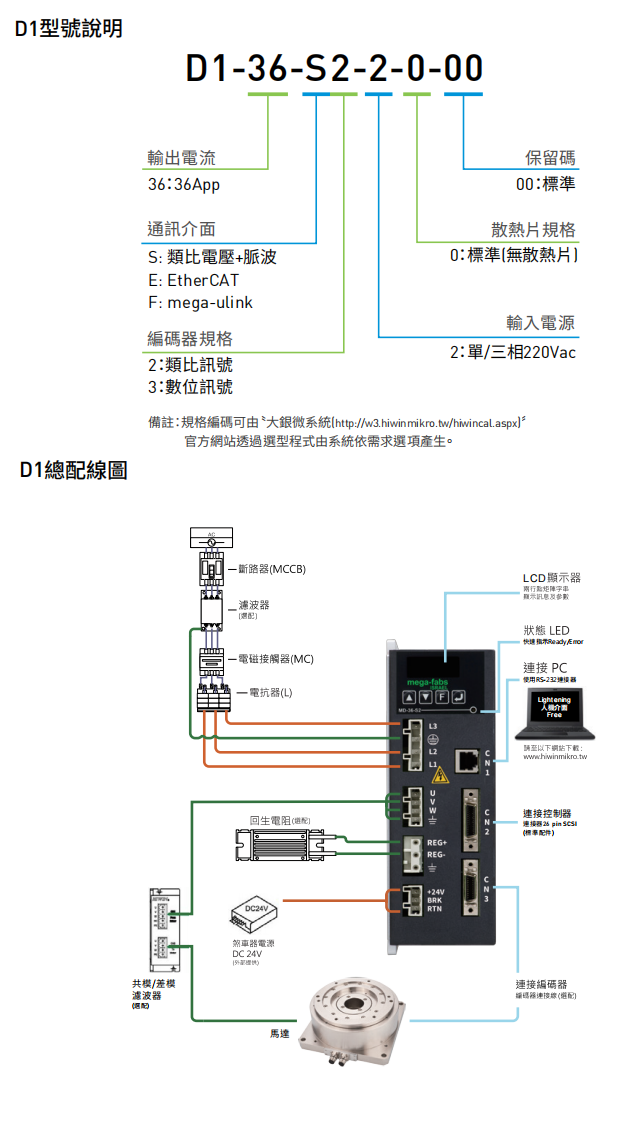
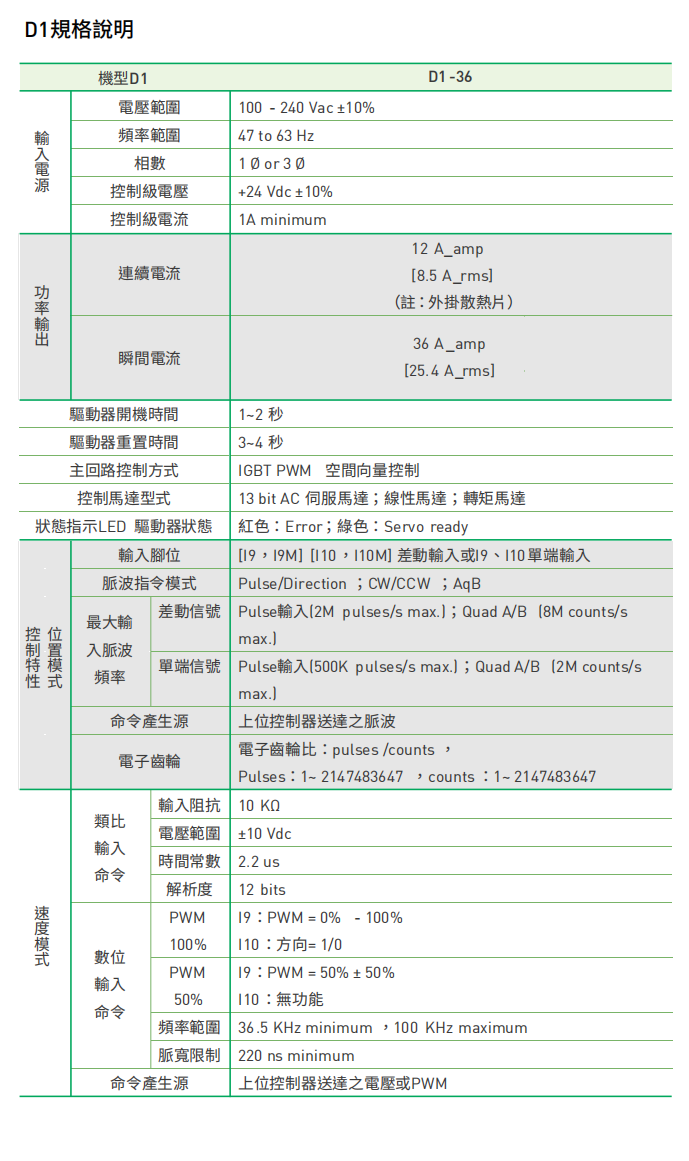
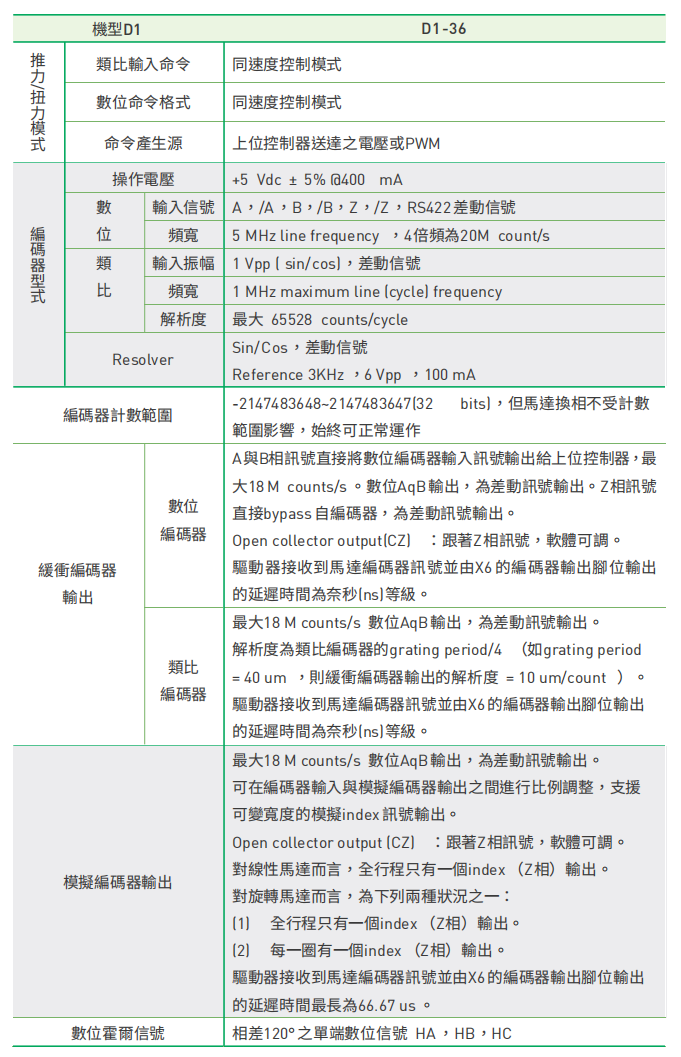
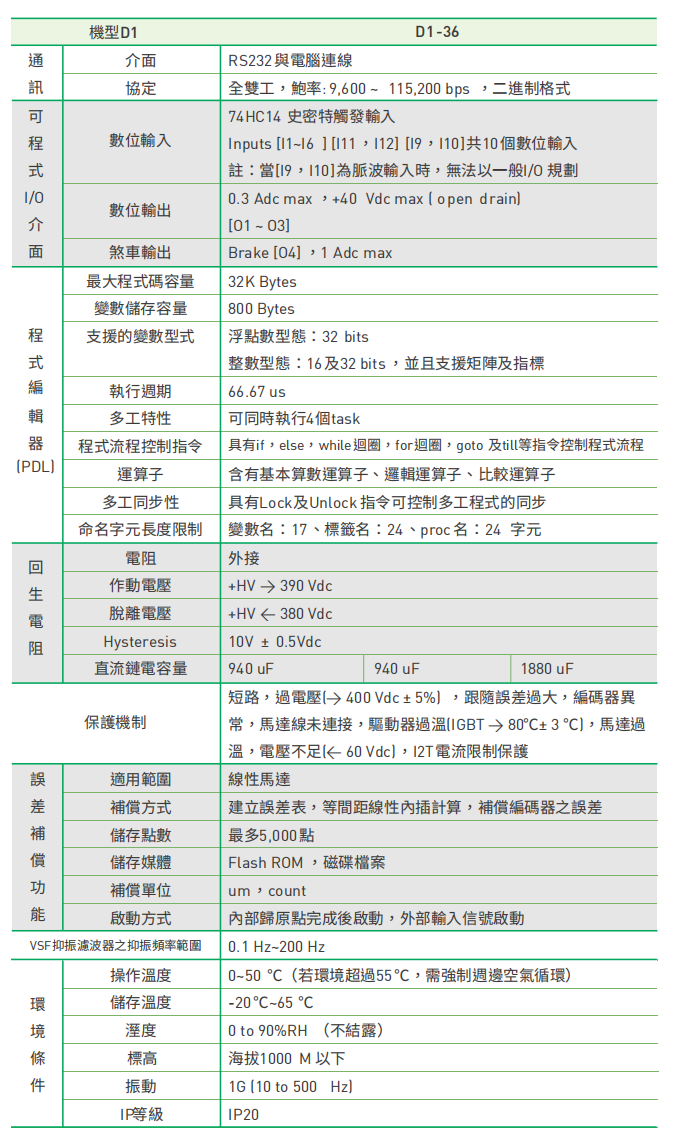
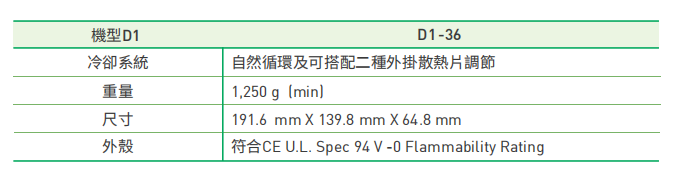
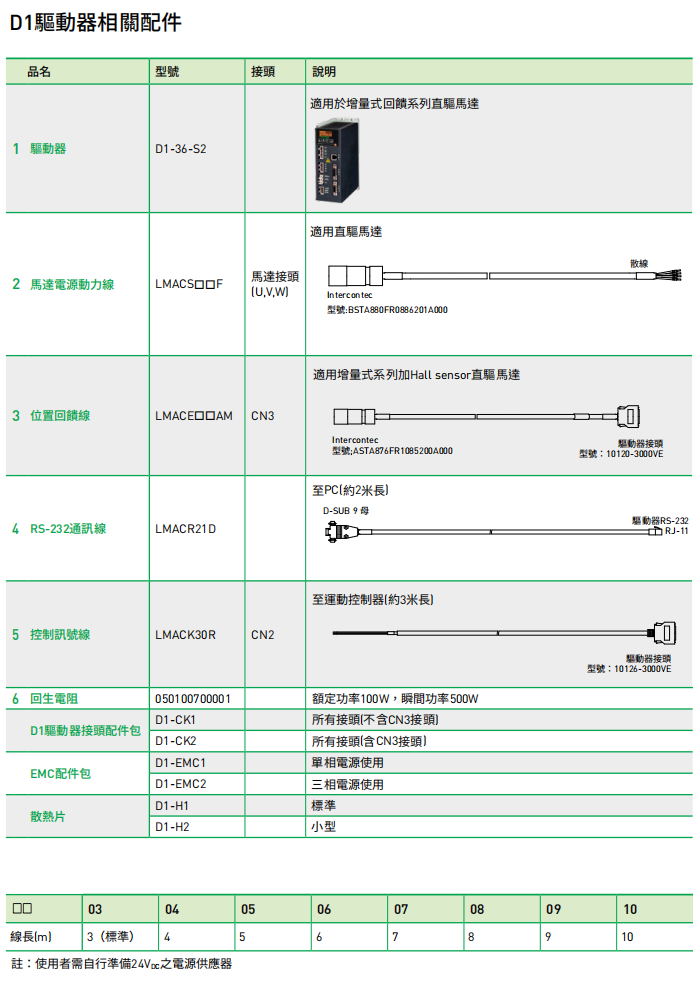
D1 驅(qū)動器
? 100-240VAC電源輸入
? 支援STP/DIR,CW/CCW,A/B脈波格式(差動/單端介面)
? 支援±10V電壓或數(shù)位指令,適用于速度模式以及推力/扭力模式
? 內(nèi)建誤差補償功能、抑制震動功能
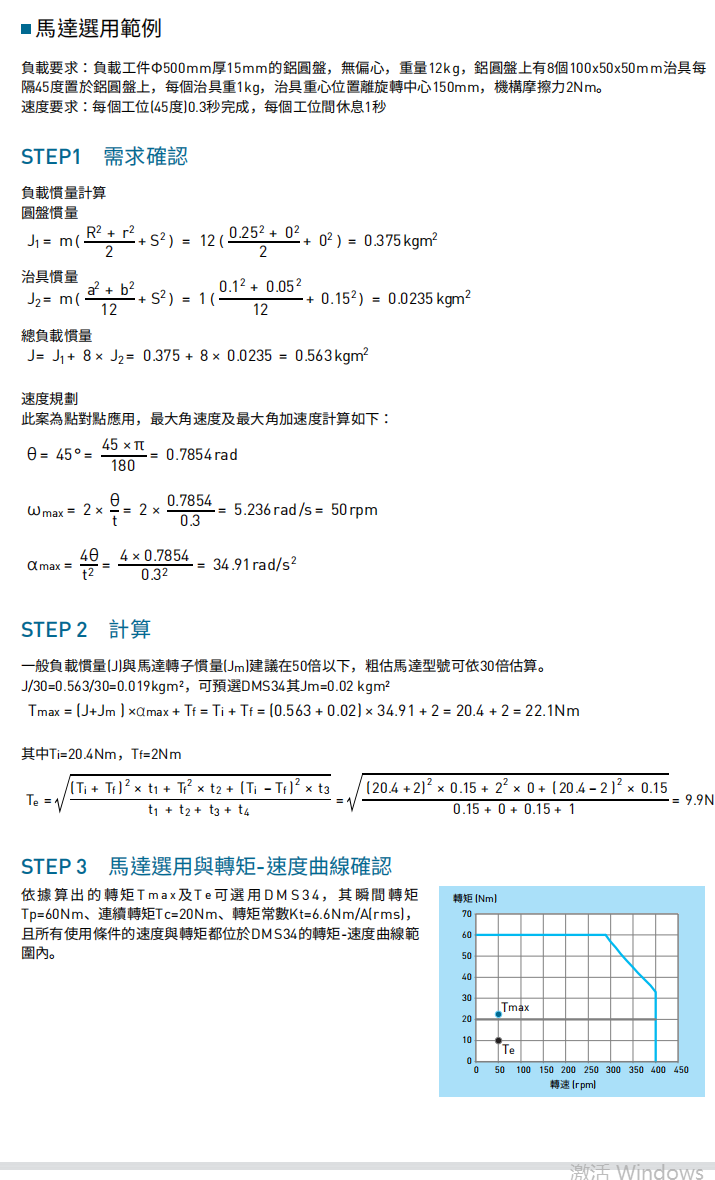
附錄A: 馬達(dá)選配
附錄A: 馬達(dá)選配
開始選配馬達(dá)
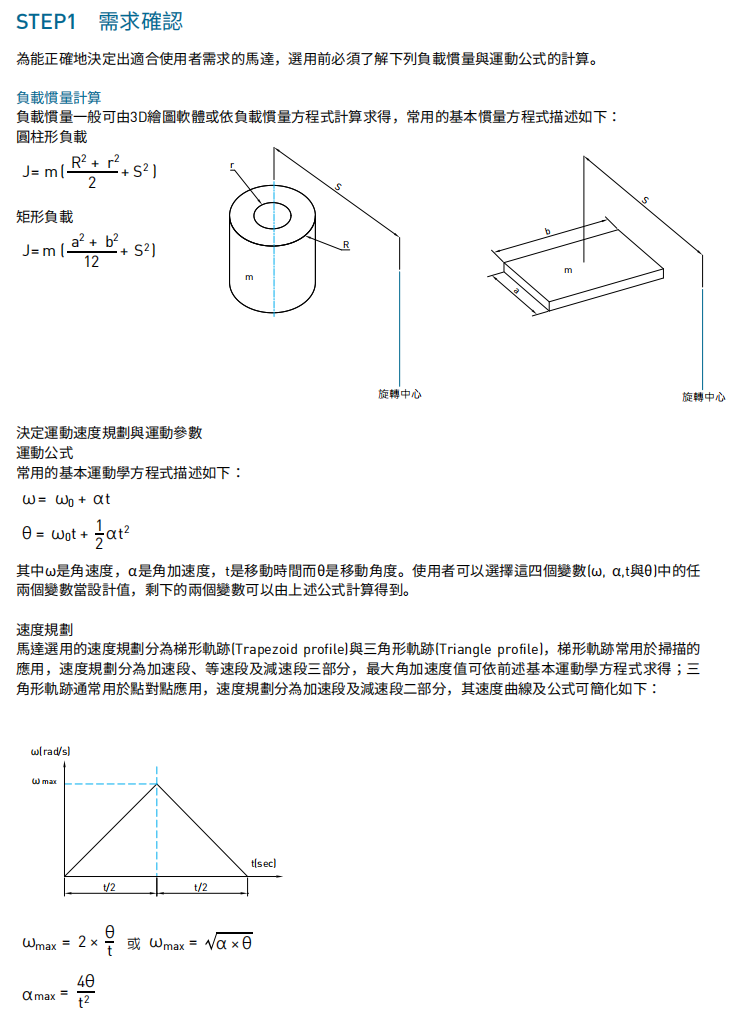
以下內(nèi)容將說明如何根據(jù)速度、行程、負(fù)載等需求來選擇合適的馬達(dá)。進(jìn)行選配工作的基本流程如下:
開始選配馬達(dá)
以下內(nèi)容將說明如何根據(jù)速度、行程、負(fù)載等需求來選擇合適的馬達(dá)。進(jìn)行選配工作的基本流程如下:
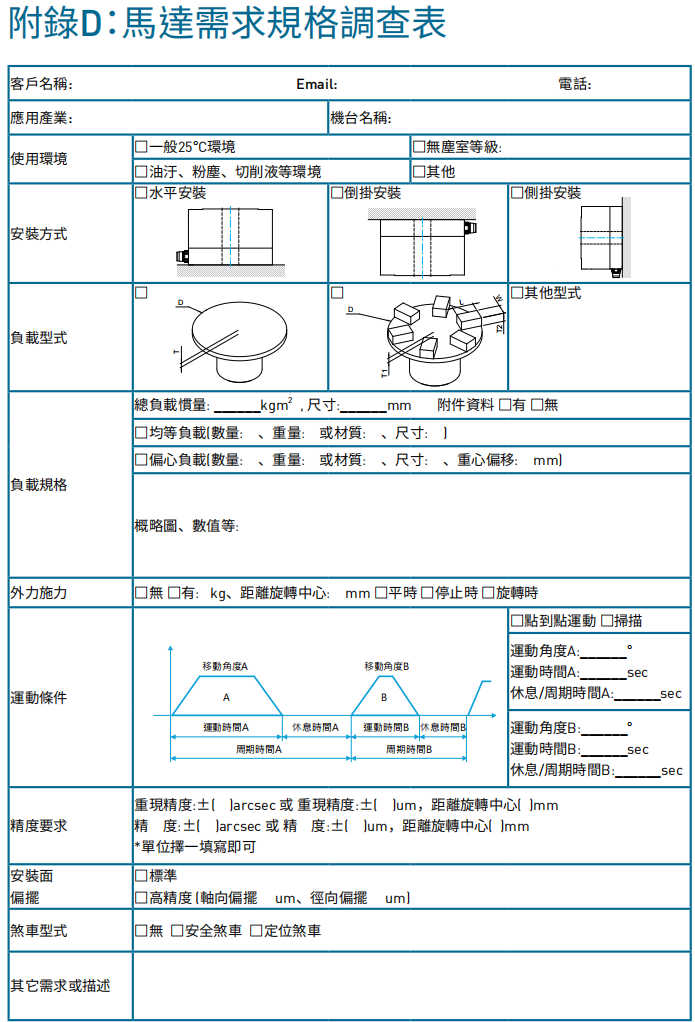
需求確認(rèn)
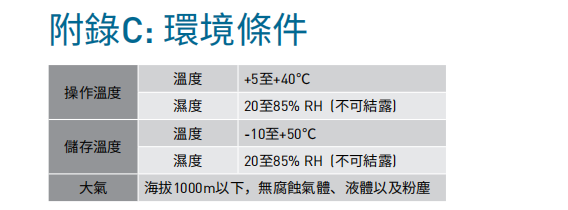
。使用環(huán)境
。安裝方式(水平、側(cè)掛]
。驅(qū)動方式
。負(fù)載條件[負(fù)載慣量、摩擦力、切削力]
。速度條件[最大加速度、最大速度]
。Duty cycle
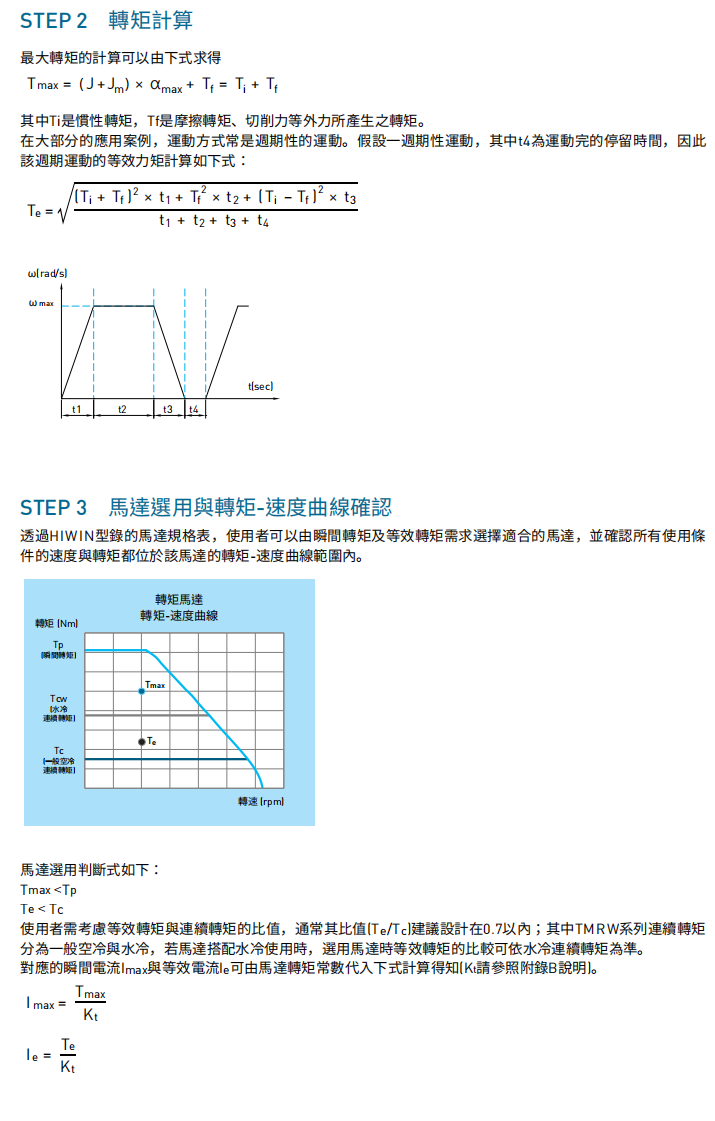
轉(zhuǎn)矩計算
。計算各使用條件速度與對應(yīng)之轉(zhuǎn)矩
。計算等效轉(zhuǎn)矩
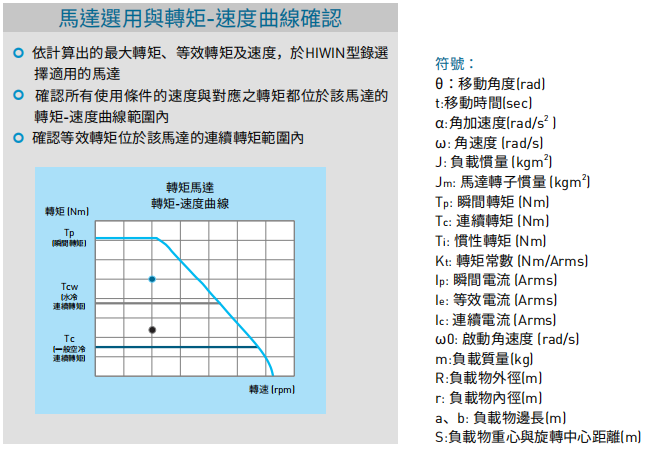
馬達(dá)選用與轉(zhuǎn)矩-速度曲線確認(rèn)
。依計算出的最大轉(zhuǎn)矩、等效轉(zhuǎn)矩及速度,于HIWIN型錄選擇適用的馬達(dá)
。確認(rèn)所有使用條件的速度與對應(yīng)之轉(zhuǎn)矩都位于該馬達(dá)的轉(zhuǎn)矩-速度曲線范圍內(nèi)
。確認(rèn)等效轉(zhuǎn)矩位于該馬達(dá)的連續(xù)轉(zhuǎn)矩范圍內(nèi)
技術(shù)用語
1.反電動勢常數(shù)[線間]: 
反電動勢常數(shù)定義為馬達(dá)在磁石溫度25°C時,單位轉(zhuǎn)速下所產(chǎn)生之感應(yīng)電壓。發(fā)生于線圈感應(yīng)到磁場變化時,反抗電流通過的電動勢。
2.連續(xù)電流: Ic/Icw (Arms)
連續(xù)電流定義為在環(huán)境溫度25°C下可連續(xù)供給馬達(dá)線圈之電流,且線圈溫度最高不會超過溫度100°C(水冷T MRW系列為120°C],此時馬達(dá)達(dá)到額定連續(xù)轉(zhuǎn)矩Tc ;因連續(xù)電流與線圈溫度有關(guān),水冷馬達(dá)TMRW系列會有相對應(yīng)空冷下之連續(xù)電流lc以及水冷下之連續(xù)電流Icw。
3.連續(xù)轉(zhuǎn)矩: Tc/Tcw (Nm]
連續(xù)轉(zhuǎn)矩定義為馬達(dá)在環(huán)境溫度25°C下連續(xù)運轉(zhuǎn)不休息且線圈最終溫度不超過線圈工作溫度100°C(水冷TMRW系列為120°C])所輸出的轉(zhuǎn)矩,此連續(xù)轉(zhuǎn)矩對應(yīng)施加給馬達(dá)之連續(xù)電流lc/Icw ;因連續(xù)轉(zhuǎn)矩與線圈溫度有關(guān),水冷馬達(dá)TMRW系列有其對應(yīng)空冷下之連續(xù)電流Tc以及水冷下之連續(xù)電流Tcw。
4.線間電感: L ([mH)
線間電感定義為馬達(dá)在連續(xù)電流lc/Icw下時所量測之線圈線間電感值。
5.線間電阻: R25 【Ω】
線間電組定義為馬達(dá)在線圈溫度25°C時所量測之線圈線間電阻值。
6.馬達(dá)常數(shù):
馬達(dá)常數(shù)定義為在線圈以及磁石溫度25°C時馬達(dá)輸出轉(zhuǎn)矩對消耗功率開根號的比值,越高的馬達(dá)常數(shù)代表馬達(dá)在輸出特定轉(zhuǎn)矩時會有越低的功率損失。
7.極數(shù): 2p
極數(shù)2p定義為轉(zhuǎn)子的總極數(shù),其中p為極對數(shù)。
8.瞬間電流: Ip [Arms)
瞬間電流定義為馬達(dá)達(dá)到最大推力下所對應(yīng)之瞬間大電流,而電流所達(dá)到之馬達(dá)溫度不可使磁鐵退磁;一般來說,馬達(dá)在正常操作范圍,瞬間電流可允許供給--秒,然后需確保散熱至正常溫度后才可再供給瞬間電流。
9.瞬間轉(zhuǎn)矩: Tp (Nm)
瞬間轉(zhuǎn)矩定義為此馬達(dá)輸出不超過一秒之最大轉(zhuǎn)矩,此轉(zhuǎn)矩對應(yīng)之瞬間電流不可使磁鐵退磁。
10.轉(zhuǎn)子慣性矩: J (kgm3)
轉(zhuǎn)子慣性矩定義為轉(zhuǎn)動部抵抗轉(zhuǎn)動的慣性,與外型以及質(zhì)量有關(guān)。
11.堵轉(zhuǎn)電流: I/Isw [Arms)
堵轉(zhuǎn)電流定義為當(dāng)馬達(dá)在環(huán)境溫度25°C下且馬達(dá)為堵轉(zhuǎn)條件下所能供給之電流上限;因與散熱條件有關(guān),水冷式馬達(dá)TMRW系列會有對應(yīng)空冷下堵轉(zhuǎn)電流|ls以及水冷下堵轉(zhuǎn)電流Isw。
12.堵轉(zhuǎn)轉(zhuǎn)矩: Ts/Tsw[Nm)
堵轉(zhuǎn)轉(zhuǎn)矩定義為當(dāng)馬達(dá)在環(huán)境溫度25°C下且馬達(dá)為堵轉(zhuǎn)條件下所能供給之轉(zhuǎn)矩上限;因與散熱條件有關(guān),水冷式馬達(dá)TMRW系列會有對應(yīng)空冷下堵轉(zhuǎn)力矩Ts以及水冷下堵轉(zhuǎn)轉(zhuǎn)矩Tsw。
13.熱阻: Rth/Rthw [K/W)
熱阻定義為熱量從馬達(dá)線圈內(nèi)到散熱環(huán)境所受到之阻力(空冷為25°C下馬達(dá)外部自然對流與輻射,水冷則為馬達(dá)外部以水溫25°C強制水冷) ; 熱阻越高表示相同熱量輸入下,線圈與散熱環(huán)境的溫差越大。
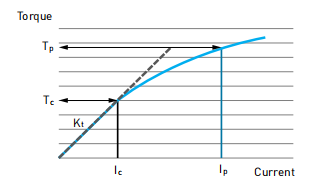
14.轉(zhuǎn)矩常數(shù): Kt (Nm/Arms)磁石溫度25°C .
轉(zhuǎn)矩常數(shù)定義為馬達(dá)在單位電流[Arms]下所能輸出的轉(zhuǎn)矩;除TMRW水冷馬達(dá)系列外,其馀系列在正常工作范圍下,輸出轉(zhuǎn)矩與輸入電流接近線性關(guān)傈,非線性部份是因鐵心飽和所導(dǎo)致。
15.最高轉(zhuǎn)速[RPM)
最高轉(zhuǎn)速定義為在特定轉(zhuǎn)矩下(- 般為連續(xù)轉(zhuǎn)矩),所能提供的最高轉(zhuǎn)速;若內(nèi)部有安裝軸承則最高轉(zhuǎn)速會受限于軸承的DN值;在水冷馬達(dá)中有定義三種情況的最高轉(zhuǎn)速: 空冷連續(xù)轉(zhuǎn)矩下最高轉(zhuǎn)速、水冷連續(xù)轉(zhuǎn)矩^下最高轉(zhuǎn)速及瞬間轉(zhuǎn)矩下最高轉(zhuǎn)速。.
16.額定轉(zhuǎn)速w,[RPM]
額定轉(zhuǎn)速定義為在馬達(dá)連續(xù)運轉(zhuǎn)不休息的情況下,轉(zhuǎn)子不會因鐵損造成轉(zhuǎn)子溫度過高[>80°C]而損壞的轉(zhuǎn)速;如果超過該轉(zhuǎn)速必須降低工作遇期或者提供轉(zhuǎn)子額外散熱設(shè)計。馬達(dá)工作區(qū)間解說請參考17 轉(zhuǎn)矩與速度曲線圖。
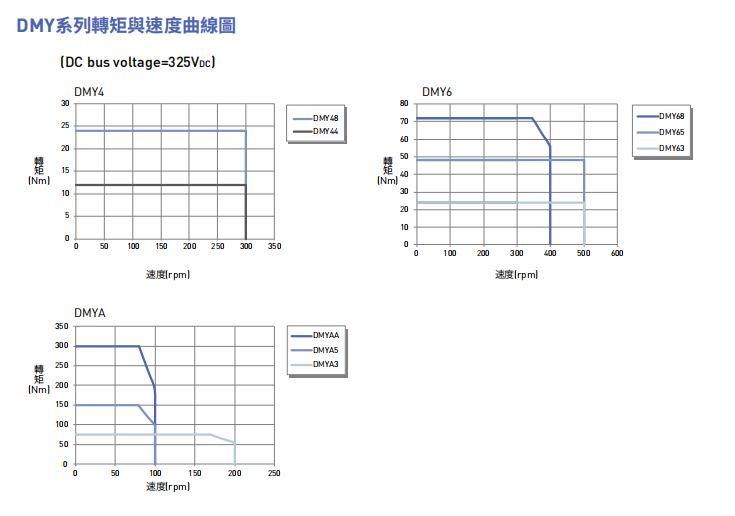
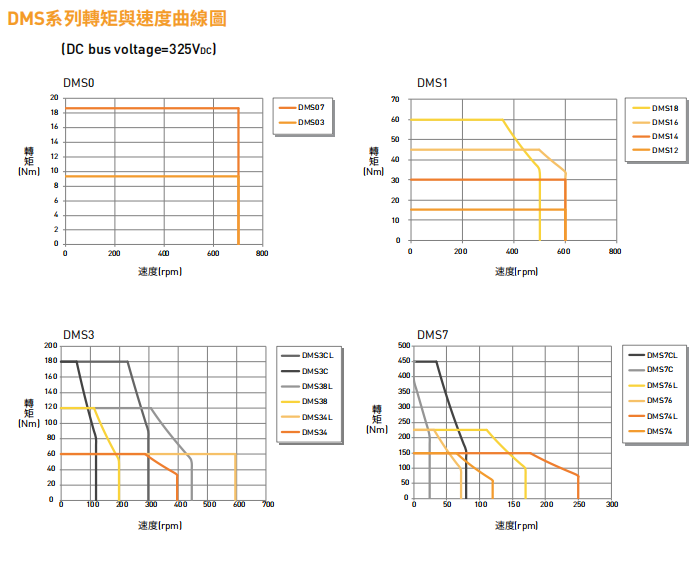
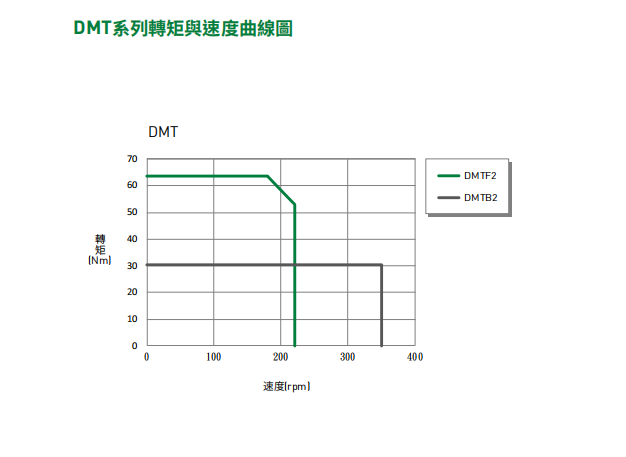
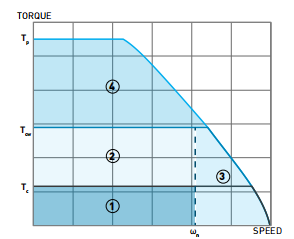
17.轉(zhuǎn)矩與轉(zhuǎn)速曲線圖
轉(zhuǎn)矩與轉(zhuǎn)速曲線圖定義為馬達(dá)一定輸入電壓 下,所能夠輸出的轉(zhuǎn)矩與轉(zhuǎn)速對照圖,考慮馬達(dá)溫升的情況
可以將該圖分割為四個操作區(qū)間如下圖:
①:馬達(dá)在空冷且轉(zhuǎn)矩小于T。的情況下,可連續(xù)運轉(zhuǎn)于w以下不休息。
①+②:馬達(dá)在水冷且轉(zhuǎn)矩小于T的情況下,可連續(xù)運轉(zhuǎn)于w,以下不休息。
③:馬達(dá)在空冷且轉(zhuǎn)矩小于T下或在水冷且轉(zhuǎn)矩小于的情況下,轉(zhuǎn)速大于wn,必須降低工作遇期或者提供轉(zhuǎn)子額外散熱,避免轉(zhuǎn)子過熱。
④:馬達(dá)在空冷且轉(zhuǎn)矩大于T或在水冷且轉(zhuǎn)矩大于w的情況下,必須降低工作遇期,在達(dá)到T。的情況下最多只能持續(xù)輸出1秒,避免定子過熱。
18.最大操作電壓(Voc] :
最大操作電壓定義為馬達(dá)正常工作環(huán)境所能使用的最大電壓。
19.解析度: p/rev
解析度定義為馬達(dá)位置回饋系統(tǒng)在-圈內(nèi)所細(xì)分割的數(shù)量。
20.精度: arc-sec
精度定義為目標(biāo)位置與實際位置間的誤差; 在HIWIN的定義下,馬達(dá)每22.5°正反轉(zhuǎn)兩趨量測,取其誤差最大范圍定義之。
21. (雙向]重現(xiàn)精度: arc-sec
重現(xiàn)精度定義為馬達(dá)移動到相同角度下,精度的重現(xiàn)性。
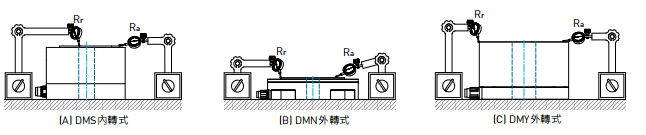
22.軸向偏擺與徑向偏擺:
軸向偏擺定義為馬達(dá)旋轉(zhuǎn)時,量測客戶安裝面與旋轉(zhuǎn)軸平行方向所得之偏擺量Ra ;徑向偏擺則定義為馬達(dá)旋轉(zhuǎn)時,量測客戶安裝面與旋轉(zhuǎn)軸垂直方向所得之偏擺量Rr,其中因應(yīng)馬達(dá)類型不同,量測基準(zhǔn)參考下圖。
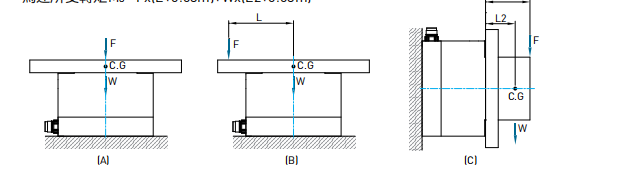
23.負(fù)載能力:
馬達(dá)在使用時需考慮該馬達(dá)結(jié)構(gòu)所能承受的負(fù)載能力,可由外力以及安裝方式計算該負(fù)載是否在馬達(dá)結(jié)構(gòu)可承受之范圍內(nèi),計算過程中馬達(dá)所受軸向力需小于馬達(dá)最大軸向荷重Fi<Fa且承受轉(zhuǎn)矩需小于馬達(dá)最大轉(zhuǎn)矩荷重Mi<M情況下,才可使用。
[A]外力=F
馬達(dá)所受軸向力F1=F +負(fù)載重量W
馬達(dá)所受轉(zhuǎn)矩M1=0
(B]外力=F
馬達(dá)所受軸向力F2=F +負(fù)載重量W
馬達(dá)所受轉(zhuǎn)矩M2 =FxL
[C]外力=F
馬達(dá)所受軸向力F3=F+負(fù)載重量W
馬達(dá)所受轉(zhuǎn)矩M3 =Fx[L +0.03m]+Wx[L 2+0.03m]
附錄E:常見問題
1. 內(nèi)轉(zhuǎn)式與外轉(zhuǎn)式直驅(qū)馬達(dá)的差異
同樣體積的內(nèi)轉(zhuǎn)及外轉(zhuǎn)直驅(qū)馬達(dá),外轉(zhuǎn)型馬達(dá)的扭力規(guī)格比較大,因為結(jié)構(gòu)設(shè)計本身較容易實現(xiàn)較大扭力,外轉(zhuǎn)式的轉(zhuǎn)子先天上慣量就相對于內(nèi)轉(zhuǎn)式的大,因此搭配負(fù)載時,負(fù)載慣量比會比較小,也就相對比較容易控制。
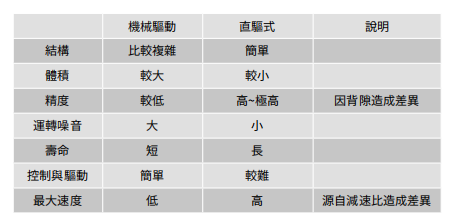
2.機械傳動與直驅(qū)式馬達(dá)的優(yōu)劣分析
機械傳動式具體是指透過減速機、皮帶、蝸輪、螺捍等的傳動,下面列出差異分析。
3.軸向與徑向偏擺
對于直驅(qū)馬達(dá)應(yīng)用,軸向的偏擺比較重要,因工件乘載于馬達(dá)上時,軸向偏擺反應(yīng)出來的是工件旋轉(zhuǎn)時的上上下下的飄動,不利于實際施工。
4.馬達(dá)慣量的影響
對于直驅(qū)馬達(dá)于自動化應(yīng)用而言,常見于伺服馬達(dá)上的慣量比要小于15或是10的規(guī)則,很難適用于直驅(qū)馬達(dá)上,就結(jié)構(gòu)而會直驅(qū)馬達(dá)負(fù)載慣量容易一下子就是轉(zhuǎn)子慣量的數(shù)十倍以上,通常此時就要考慮負(fù)載接合面與直驅(qū)馬達(dá)的鎖附剛性,較高的鎖附剛性能讓高負(fù)載慣量避免造成過低的第-共振頻。
5.連續(xù)轉(zhuǎn)矩和瞬間轉(zhuǎn)矩對于馬達(dá)的意義
連續(xù)轉(zhuǎn)矩維馬達(dá)可以持續(xù)提供電流所得的轉(zhuǎn)矩,而瞬間轉(zhuǎn)矩為更高電流打入得到的轉(zhuǎn)矩,但因為電流比較高所以無法持續(xù)打入,只能夠限定打入幾秒或更短時間,否則會造成馬達(dá)破壞。實務(wù)上,瞬間轉(zhuǎn)矩都應(yīng)用于加減速的運動區(qū)段,好比短跑選手的加減速,瞬間爆發(fā)出來,但無法持續(xù)而不休息。而連續(xù)轉(zhuǎn)矩則用來與實際運動計算出的等效轉(zhuǎn)矩相互比較,當(dāng)?shù)刃мD(zhuǎn)矩小于連續(xù)轉(zhuǎn)矩,則該設(shè)計沒問題,若等效轉(zhuǎn)矩超過該馬達(dá)的連續(xù)轉(zhuǎn)矩,此時馬達(dá)會過熱造成馬達(dá)損壞。
6.定位煞車與安全煞車
定位煞車:應(yīng)用于馬達(dá)到位后夾持,減少馬達(dá)抵抗外部扭矩的負(fù)擔(dān)安全煞車:應(yīng)用于預(yù)防機臺斷電導(dǎo)致撞機或移動風(fēng)險。



TMS7CLGH(DMS7CLGH))旋轉(zhuǎn)平臺(注意新款以D開頭)
TMS0(DMSO)系列
TMS03G(DMS03G)
TMS03GH(DMS03GH)
TMS07G(DMS07G)
TMS07GH(DMS07GH)
TMS0(DMSO)系列(注意新款以D開頭)
TMS03G(DMS03G)
TMS03GH(DMS03GH)
TMS07G(DMS07G)
TMS07GH(DMS07GH)
TMS1(DMS1)系列(注意新款以D開頭)
TMS12G(DMS12G)
TMS12GH(DMS12GH)
TMS14G(DMS14G)
TMS14GH(DMS14GH)
TMS16G(DMS16G)
TMS16GH(DMS16GH)
TMS18G(DMS18G)
TMS18GH(DMS18GH)
TMS3(DMS3)系列(注意新款以D開頭)
TMS32G(DMS32G)
TMS32GH(DMS32GH)
TMS34G(DMS34G)
TMS34GH(DMS34GH)
TMS34LG(DMS34LG)
TMS34LGH(DMS34LGH)
TMS38G(DMS38G)
TMS38GH(DMS38GH)
TMS38LG(DMS38LG)
TMS38LGH(DMS38LGH)
TMS3CG(DMS3CG)
TMS3CGH(DMS3CGH)
TMS3CLG(DMS3CLG)
TMS3CLGH(DMS3CLGH)
TMS7(DMS7)系列(注意新款以D開頭)
TMS74G(DMS74G)
TMS74GH(DMS74GH)
TMS74LG(DMS74LG)
TMS74LGH(DMS74LGH)
TMS76G(DMS76G)
TMS76GH(DMS76GH)
TMS76LG(DMS76LG)
TMS76LGH(DMS76LGH)
TMS7CG(DMS7CG)
TMS7CGH(DMS7CGH)
TMS7CLG(DMS7CLG)
TMY(DMY)旋轉(zhuǎn)平臺(注意新款以D開頭)
TMY4(DMY4)系列(注意新款以D開頭)
TMY44(DMY44)
TMY48(DMY48)
TMY6(DMY6)系列(注意新款以D開頭)
TMY63G(DMY63G)
TMY63GH(DMY63GH)
TMY63(DMY63 )
TMY65G(DMY65G)
TMY65GH(DMY65GH)
TMY65(DMY65)
TMY68G(DMY68G)
TMY68GH(DMY68GH)
TMY68(DMY68)
TMYA(DMYA)系列(注意新款以D開頭)
TMYA5G(DMYA5G)
TMYA5GH(DMYA5GH)
TMYA5(DMYA5)
TMYAAG(DMYAAG)
TMYAAGH(DMYAAGH)
TMYAA(DMYAA)
TMN旋轉(zhuǎn)平臺 (注意新款以D開頭)
TMN(DMN)增量式系列
TMN21(DMN21)
TMN42G(DMN42G)
TMN42GH(DMN42GH)
TMN71G(DMN71G)
TMN71GH(DMN71GH)
TMN93G(DMN93G)
TMN93GH(DMN93GH)
TMN95G(DMN95G)
TMN95GH(DMN95GH)
力矩馬達(dá)-TMRW(DMRW)水冷式轉(zhuǎn)矩馬達(dá)(注意新款以D開頭)
TMRW1(DMRW1)系列(注意新款以D開頭)
TMRW13(DMRW13)
TMRW13L(DMRW13L)
TMRW15(DMRW15)
TMRW15L(DMRW15L)
TMRW17(DMRW17)
TMWR17L(DMWR17L)
TMRW1A(DMRW1A)
TMRW1AL(DMRW1AL)
TMRW1F(DMRW1F)
TMRW1FL(DMRW1FL)
TMRW2(DMRW2)系列(注意新款以D開頭)
TMRW23(DMRW23)
TMWR23L(DMWR23L)
TMRW25(DMRW25)
TMRW25L(DMRW25L)
TMRW27(DMRW27)
TMRW27L(DMRW27L)
TMRW2A(DMRW2A)
TMRW2AL(DMRW2AL)
TMRW2F(DMRW2F)
TMRW2FL(DMRW2FL)
TMRW4(DMRW4)系列(注意新款以D開頭)
TMRW43(DMRW43)
TMRW43L(DMRW43L)
TMRW45(DMRW45)
TMRW45L(DMRW45L)
TMRW47(DMRW47)
TMRW47L(DMRW47L)
TMRW4A(DMRW4A)
TMRW4AL(DMRW4AL)
TMRW4F(DMRW4F)
TMRW4FL(DMRW4FL)
TMRW7(TMRW7)系列(注意新款以D開頭)
TMRW73(DMRW73)
TMRW73L(DMRW73L)
TMRW75(DMRW75)
TMRW75L(DMRW75L)
TMRW77(DMRW77)
TMRW77L(DMRW77L)
TMRW7A(DMRW7A)
TMRW7AL(DMRW7AL)
TMRW7F(DMRW7F)
TMRW7FL(DMRW7FL)
TMRWA(DMRWA)系列(注意新款以D開頭)
TMRWA3(DMRWA3)
TMRWA3L(DMRWA3L)
TMRWA5(DMRWA5)
TMRWA5L(DMRWA5L)
TMRWA7(DMRWA7)
TMRWA7L(DMRWA7L)
TMRWAA(DMRWAA)
TMRWAAL(DMRWAAL)
TMRWAF(DMRWAF)
TMRWAFL(DMRWAFL)
TMRWD(DMRWD)系列(注意新款以D開頭)
TMRWD3(DMRWD3)
TMRWD3L(DMRWD3L)
TMRWD5(DMRWD5)
TMRWD5L(DMRWD5L)
TMRWD7(DMRWD7)
TMRWD7L(DMRWD7L)
TMRWDA (DMRWDA)
TMRWDAL(DMRWDAL)
TMRWDF(DMRWDF)
TMRWDFL(DMRWDFL)
TMRWG(DMRWG)系列(注意新款以D開頭)
TMRWG7(DMRWG7)
TMRWG7L(DMRWG7L)
TMRWGA(DMRWGA)
TMRWGAL(DMRWGAL)
TMRWGF(DMRWGF)
TMRWGFL(DMRWGFL)
力矩馬達(dá)-TMRI高速水冷式轉(zhuǎn)矩馬達(dá)(注意新款以D開頭)
TMRIA(DMRIA)系列 (注意新款以D開頭)
TMRIA5-WA(DMRIA5-WA)
TMRIA5-WB(DMRIA5-WB)
TMRIA7-SC(DMRIA7-SC)
TMRIA7-WC(DMRIA7-WC)
TMRIAA-SC(DMRIAA-SC)
TMRIAA-WC(DMRIAA-WC)
TMRIAF-WC(DMRIAF-WC)
TMRIAF-WF(DMRIAF-WF)
TMRIG(DMRIG)系列 (注意新款以D開頭)
TMRIG5-SB(DMRIG5-SB)
TMRIG5-WD(DMRIG5-WD)
TMRIG5-WH(DMRIG5-WH)
TMRIG7-SB(DMRIG7-SB)
TMRIG7-WD(DMRIG7-WD)
TMRIG7-WH(DMRIG7-WH)
TMRIGA-SB(DMRIGA-SB)
TMRIGA-WD(DMRIGA-WD)
TMRIGA-WH(DMRIGA-WH)
TMRIGF-SB(DMRIGF-SB)
TMRIGF-WD(DMRIGF-WD)
TMRIGF-WH(DMRIGF-WH)
TMY(DMY)旋轉(zhuǎn)平臺
TMY4(DMY4)系列
TMY44(DMY44)
TMY48(DMY48)
TMY6(DMY6)系列
TMY63G(DMY63G)
TMY63GH(DMY63GH)
TMY63(DMY63 )
TMY65G(DMY65G)
TMY65GH(DMY65GH)
TMY65(DMY65)
TMY68G(DMY68G)
TMY68GH(DMY68GH)
TMY68(DMY68)
TMYA(DMYA)系列
TMYA5G(DMYA5G)
TMYA5GH(DMYA5GH)
TMYA5(DMYA5)
TMYAAG(DMYAAG)
TMYAAGH(DMYAAGH)
TMYAA(DMYAA)
TMS0(DMSO)系列
TMS03G(DMS03G)
TMS03GH(DMS03GH)
TMS07G(DMS07G)
TMS07GH(DMS07GH)
TMS1(DMS1)系列
TMS12G(DMS12G)
TMS12GH(DMS12GH)
TMS14G(DMS14G)
TMS14GH(DMS14GH)
TMS16G(DMS16G)
TMS16GH(DMS16GH)
TMS18G(DMS18G)
TMS18GH(DMS18GH)
TMS3(DMS3)系列
TMS32G(DMS32G)
TMS32GH(DMS32GH)
TMS34G(DMS34G)
TMS34GH(DMS34GH)
TMS34LG(DMS34LG)
TMS34LGH(DMS34LGH)
TMS38G(DMS38G)
TMS38GH(DMS38GH)
TMS38LG(DMS38LG)
TMS38LGH(DMS38LGH)
TMS3CG(DMS3CG)
TMS3CGH(DMS3CGH)
TMS3CLG(DMS3CLG)
TMS3CLGH(DMS3CLGH)
TMS7(DMS7)系列
TMS74G(DMS74G)
TMS74GH(DMS74GH)
TMS74LG(DMS74LG)
TMS74LGH(DMS74LGH)
TMS76G(DMS76G)
TMS76GH(DMS76GH)
TMS76LG(DMS76LG)
TMS76LGH(DMS76LGH)
TMS7CG(DMS7CG)
TMS7CGH(DMS7CGH)
TMS7CLG(DMS7CLG)
TMS7CLGH(DMS7CLGH)
吳女士 13527953137
相關(guān)標(biāo)簽:DD馬達(dá) 直驅(qū)馬達(dá) 力矩馬達(dá) 上銀DD馬達(dá)
上一篇:沒有了
下一篇:沒有了